I've used the Razor IMU for two years to correct the odometry from my 4wd base. Problem is when driving close to e.g. the dishwasher because of its magnetic field my robot always thinks that it is driving a curve while in reality it is driving straightforward.
I recently came across a demo video of the Tinkerforge IMU Brick 2.0 which advertises nearly immunity against magnetic interference. So I bought one and tested it.
At first the IMU Brick, with all the led it looks a bit like a Christmas tree. Fortunately they can be turned off. Software installation is complicated (requires to run a daemon). Also with 70mA the Brick draws a higher current at 5V then the Razor with 40mA.
I mounted it on the wild thumper together with the Razor IMU and was surprised that I got recently good values without any calibration, I calibrated it anyway.
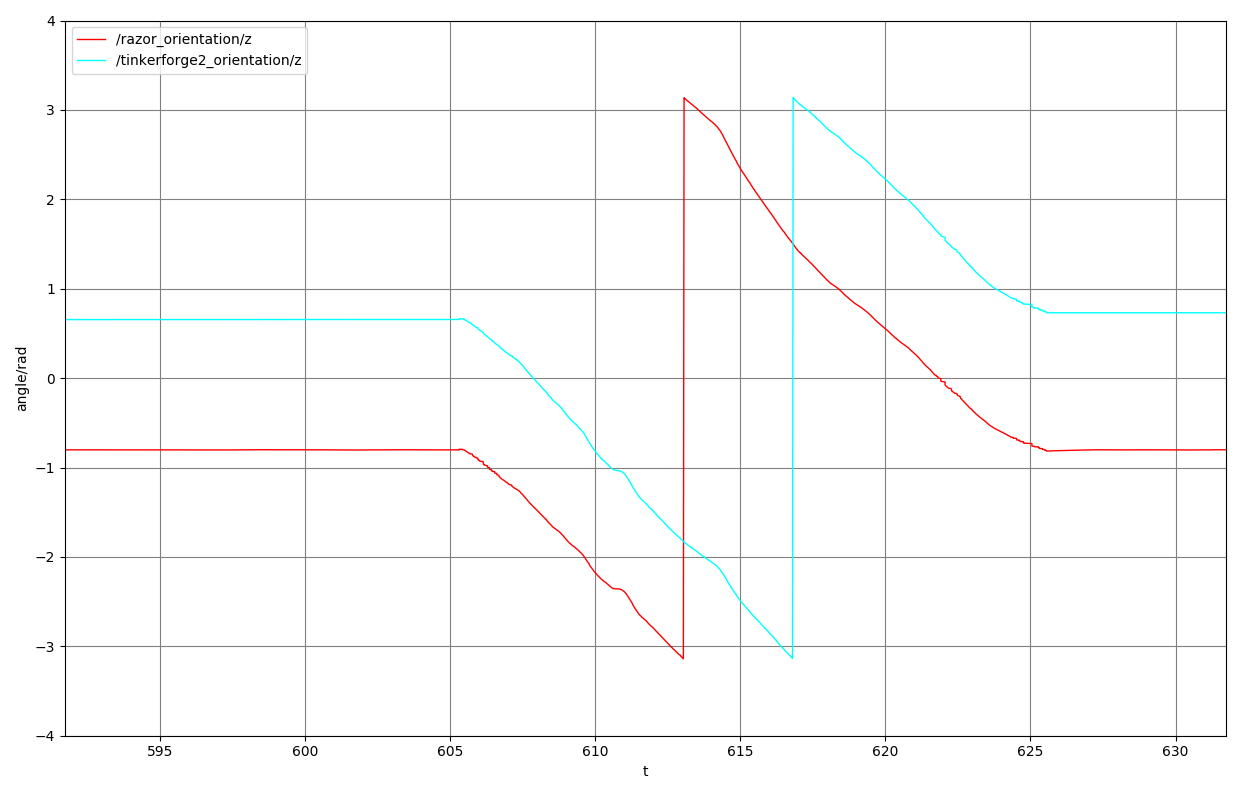
According to the datasheets the accuracy of both IMUs accelerometer, magnetometer and gyro is in the same magnitude. I started to plot the yaw (turn around z-axis) of both IMUs using rqt_plot. The result with a slow 360° turn has no surprises (Razor=red line, Brick=blue line):
Next I brought a magnet close to both IMUs. Here is the surprise: Result is little to no visible change of the Bricks orientation:
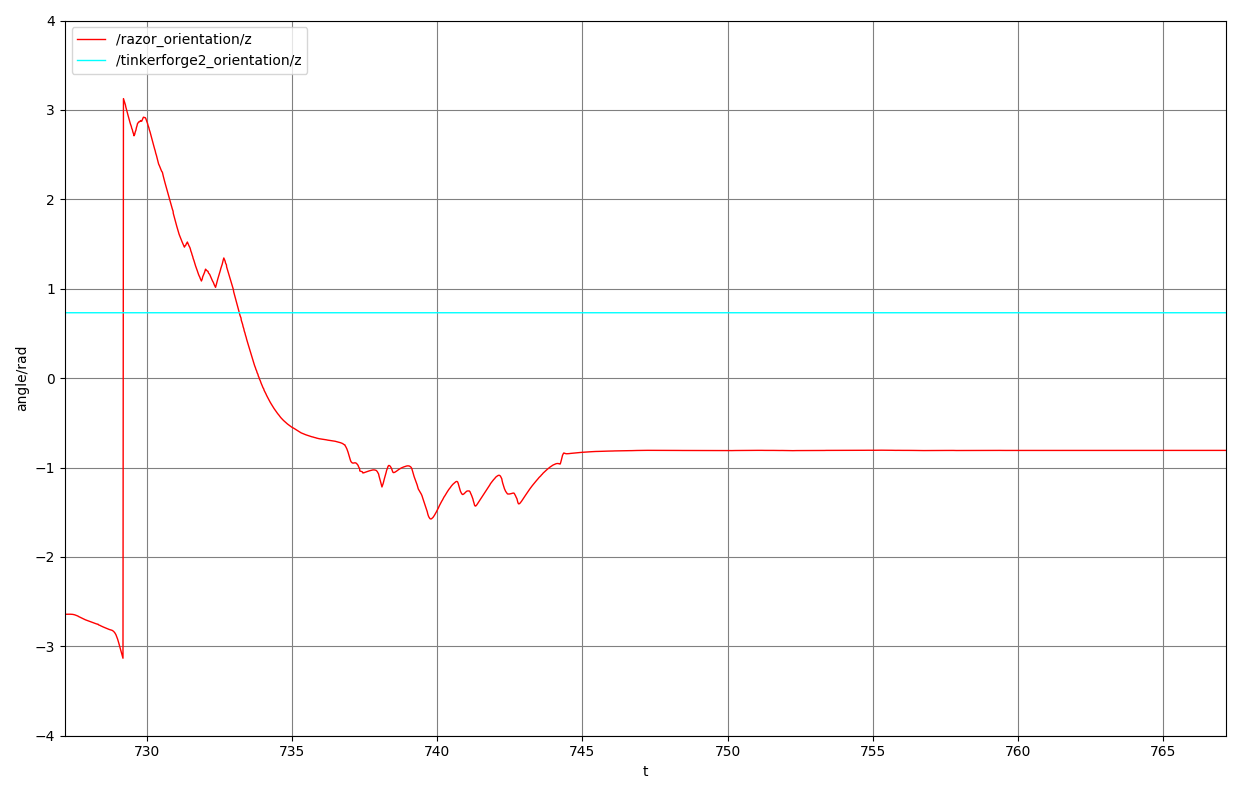 While the Razor IMU (red line) immediately reacted to the magnet the Brick (blue line) stayed nearly constant. Really awesome. That is why I'm using the Brick instead of the Razor IMU now.
While the Razor IMU (red line) immediately reacted to the magnet the Brick (blue line) stayed nearly constant. Really awesome. That is why I'm using the Brick instead of the Razor IMU now.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
Thank you - this is an EXCELLENT comparison between these two IMU units.
Are you sure? yes | no