 Morning.Star
Morning.StarI've accidentally found a name for the robot I'm building using DECAL.

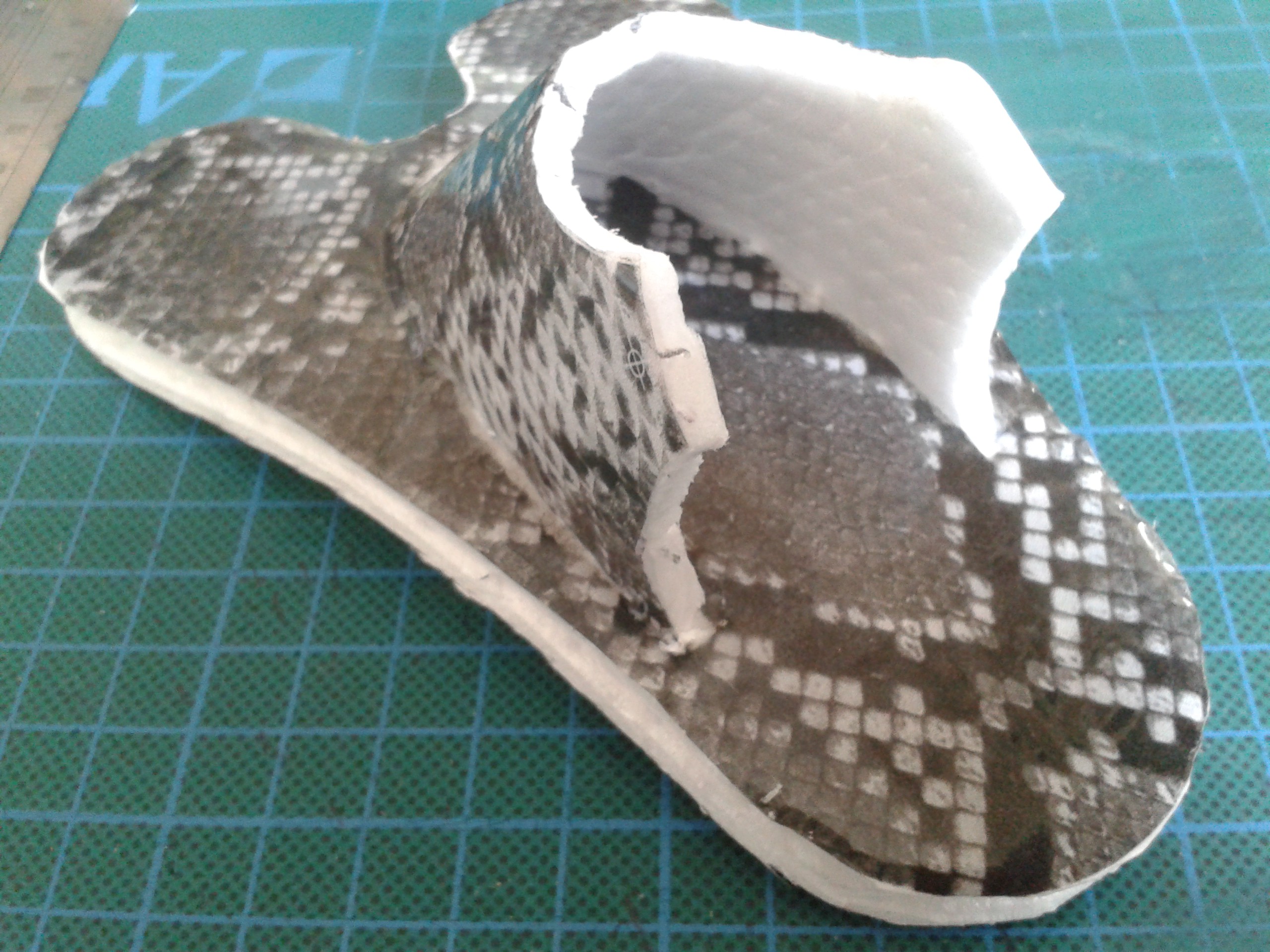
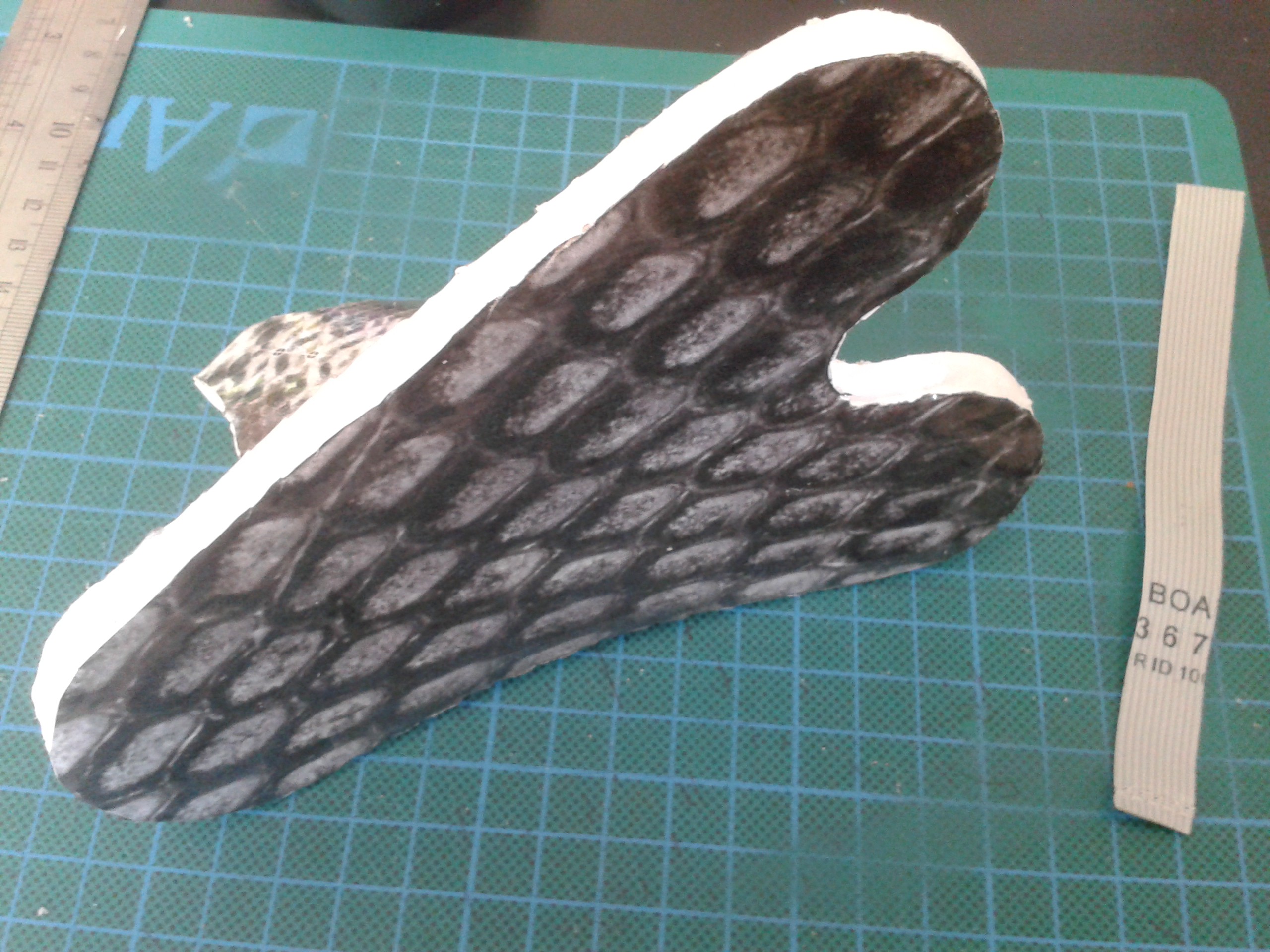
BOA isnt a snake tho. It stands on two legs to walk, so its going to need feet...
This is a major departure from the other parts I've done, so its a bit experimental. I've worked out geometry for the limbs already with Cardware, so I'm trying to match the style.
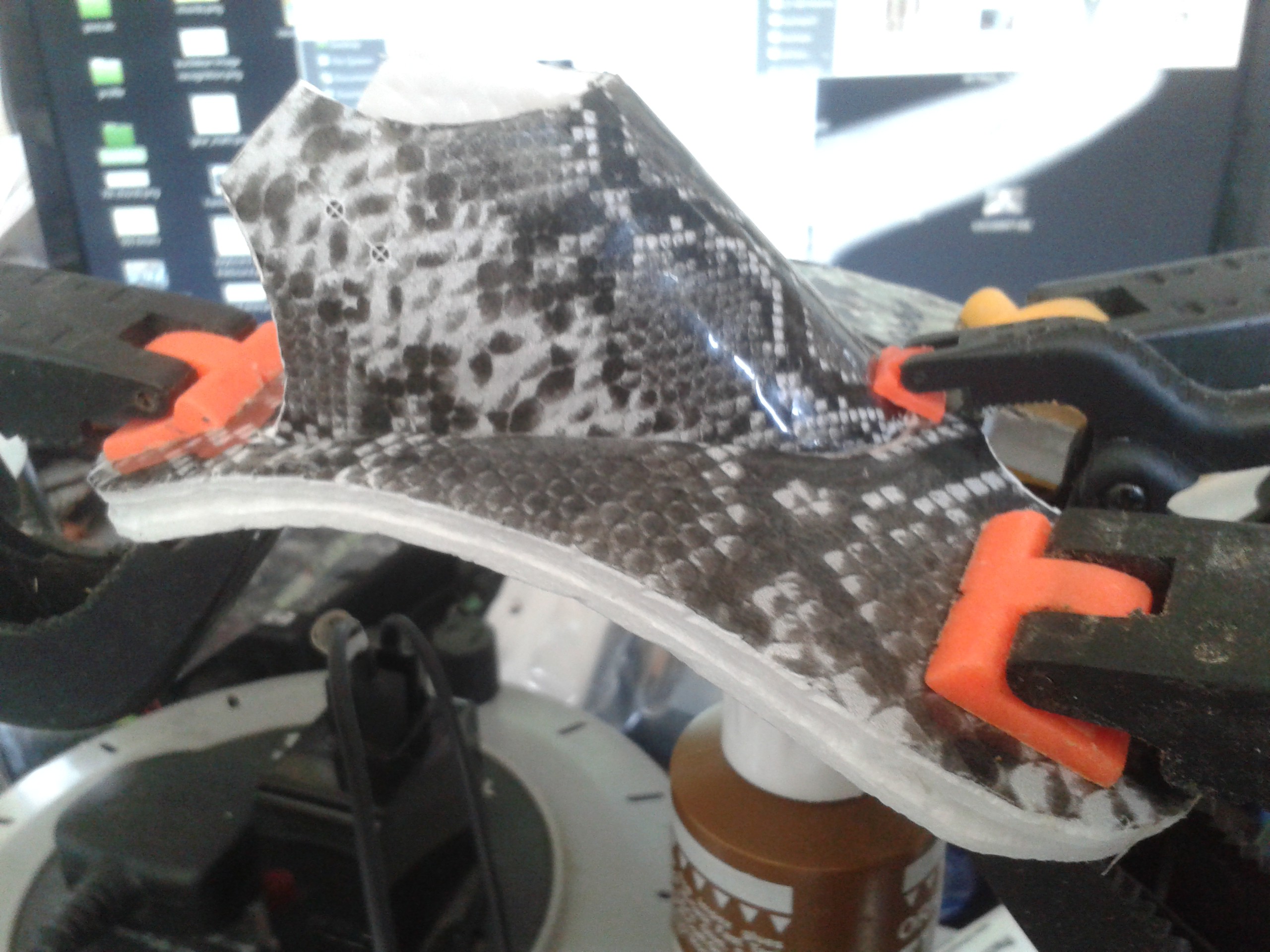
Each foot stands up on three toes, two at the front and one at the back. I had the idea to make it springy under the weight of the robot, but I suspect it will be only marginally so. The two layers are already very stiff, with a layer of PVA creating a stress across the arch it doesnt bend at all.
There is also another layer tensioning the arch underneath. This does a better job than the PVA which relaxes a little. I'll replace this with a layer of double-sided tape which will be an instant and solid fix.
The hinge mechanism to stabilise the joints turned out to be easy too, although will require a little bit of engineering to make a bearing that mates with the laminar adhesive. I've used a Felting Nail, cut down and glued in line with the servo actuator shaft on the inside of the leg section.

It still needs a bit of tube glued into the hip section so it doesnt wear away the polystyrene there.
Note the light catching the polymer skin makes the scales look disturbingly arterial with the cabling underneath. I wont make any jokes about serpentine blood supply, I promise. ;-)

Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.