 Morning.Star
Morning.StarYou cant run before you can walk, and you cant walk until you can move.
Decal fits into an overall plan, and the ESP8266 fits into this quite nicely with a bit of a shuffle. I'm now working on the software side of things to implement it, having got one working.
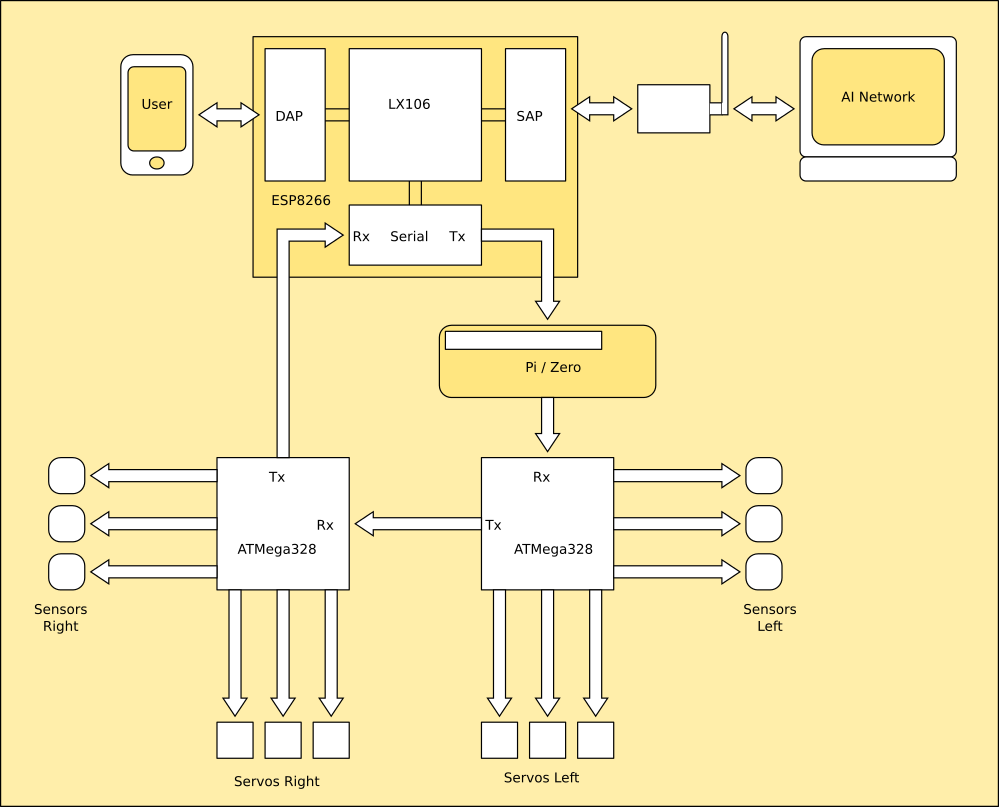
I have to allow for certain things in my development strategy, and expansion is one of them. Particularly as you've decided to make me walk right now. Using this arrangement means I can jumpstart walking, just by embedding a ring-token protocol in the ESP8266 along with the access point and network bridge.
I can add the Pi and camera system later, as well as the mobile interface, as well as another processor for sensors in the return path if I wish, and I still have I2C spare on the ESP. I can also address as many servos as I like just by adding other ATMegas in the chain - they all have identical software onboard and are configured by software.
The software on the ATMegas is not complex:
- Listen on Rx for data packages
- Pass data packages on Tx not for their servos
- Acquire sensor data and send packages on Tx
- Sequence any data packets for their servos
And the ESP is very similar, except that it integrates command and sensor data with the PC so I can develop the walking routines on that, cutting out everything else for now.
I'm not being hissy about this, the whole point of Decal is to vanish the contents of that drawing into a layer that sticks to stuff and animates it, so if you want animation now its not going to be pretty.
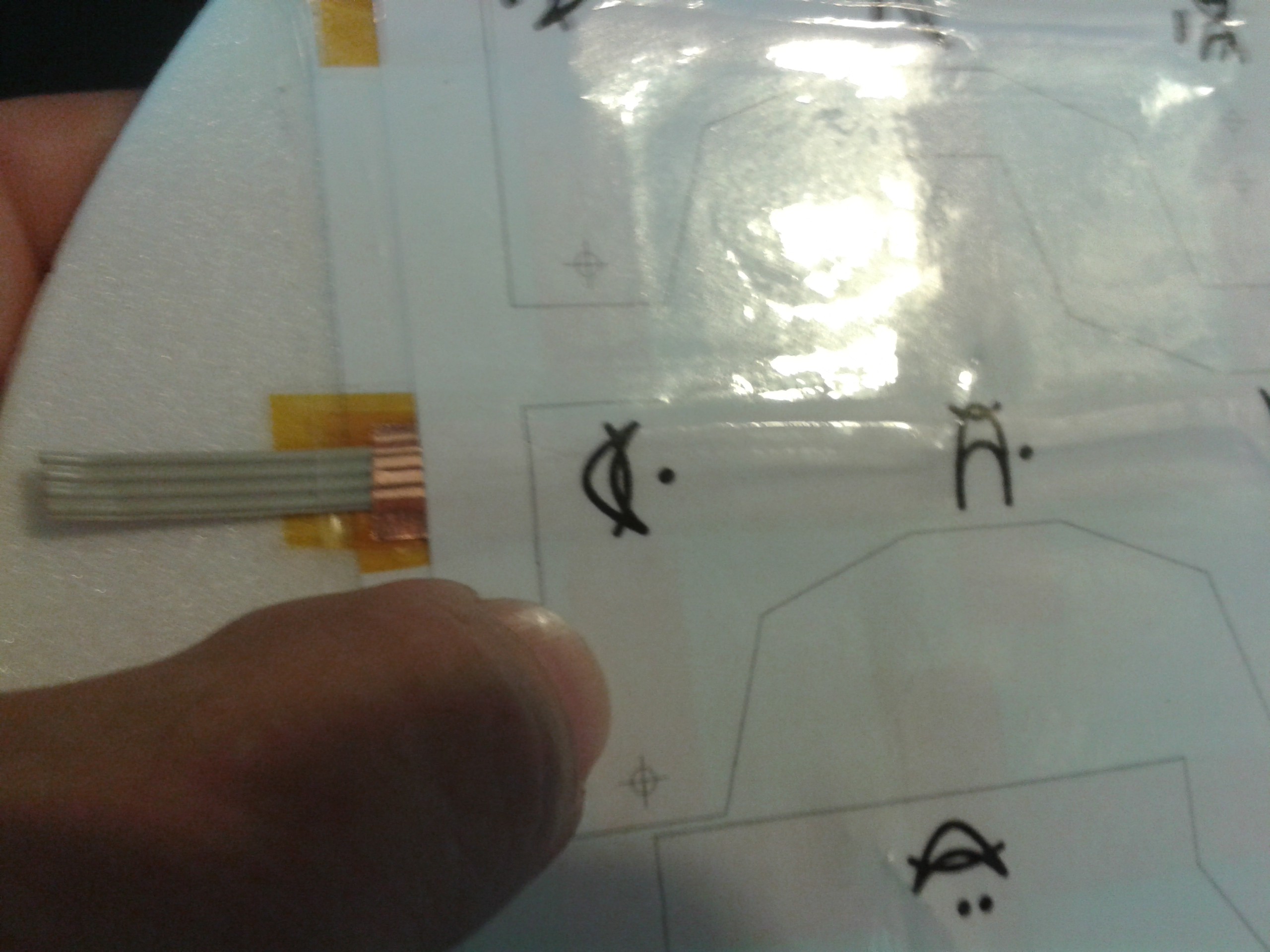

The circuits are complicated enough in two dimensions...
The sensor circuit travels down the limb and wraps round it on 3 levels, with four independent sensors on each side of the limb. The system supports up to seven levels (or 4 layers with 7 sensors, or a combination).
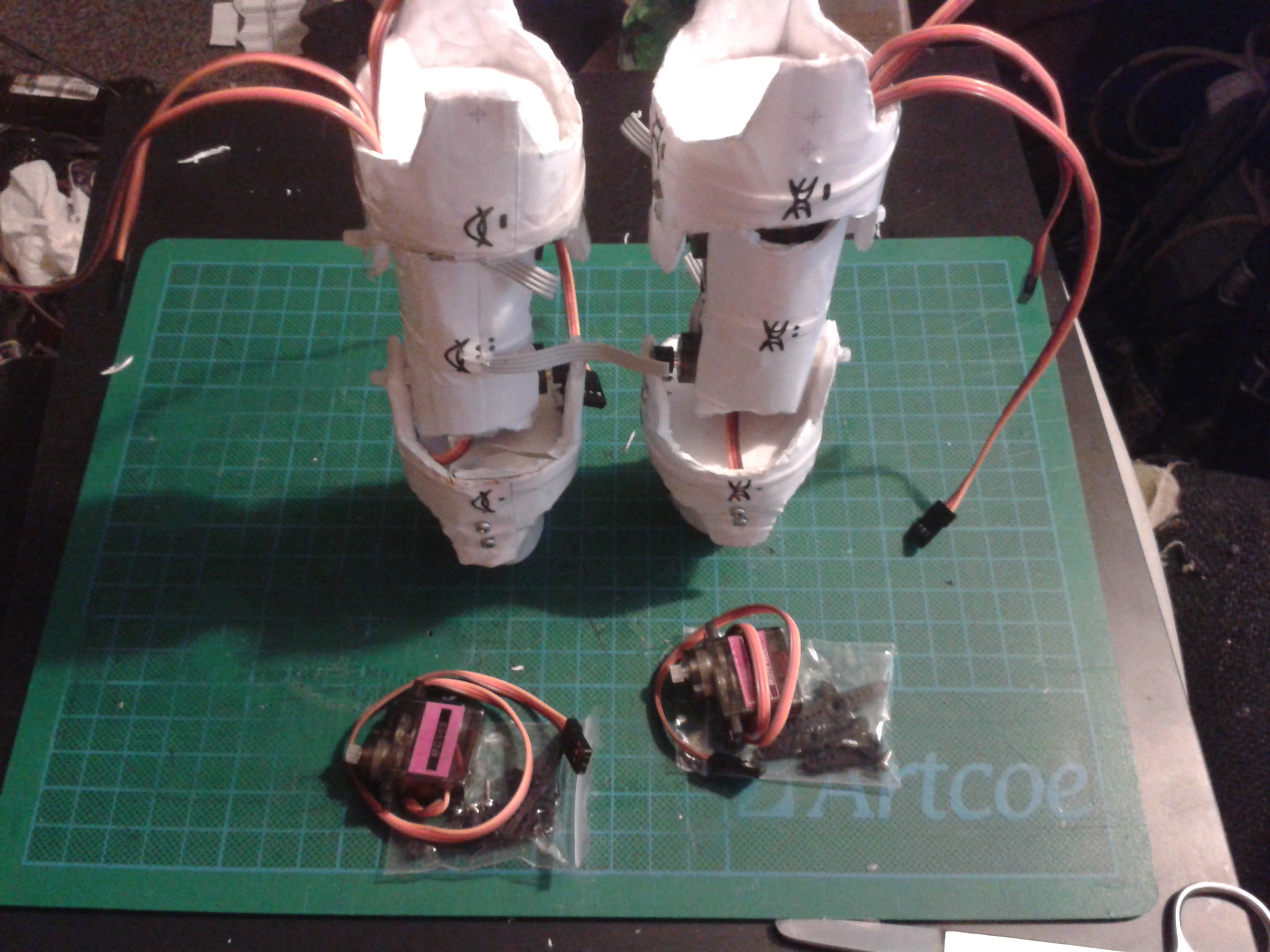
Feet and a platform on top are next. Because the leg now has 4 servos opposed in pairs, the foot can be oriented parallel to the platform regardless of location under it. This also makes it really easy to calculate the servo angles.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
Taking Steps is taking shape my friend :-)
Are you sure? yes | no