 Morning.Star
Morning.StarIts flashing lightning and thunder out there so I thought it best to not design on the computer in case the power went out and I lost work. I hate that...
So I tinkered with brains instead ;-)
More Power!
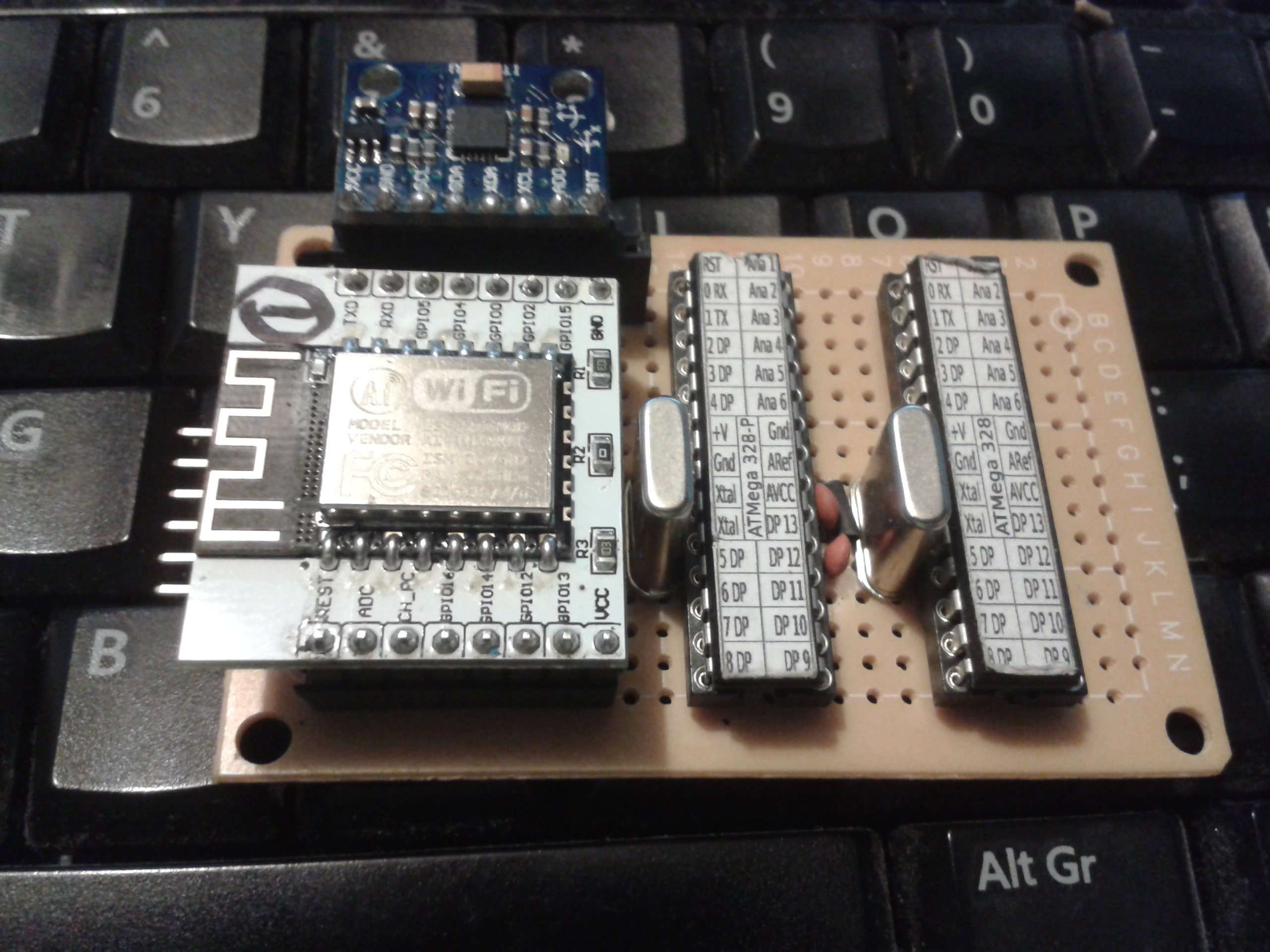
This is the 'Supercomputing' board to power my robot. It still needs harnesses for the servos and a plug-socket for the ESP's I2C port. Thats the strip of pads along the bottom edge. Brilliant breakout design I have to say...
Its a Twinduino at the moment, the pins sticking out under the ESP jumper the Serial RX and TX using a connector block, but this can be replaced with a board containing more processors and/or an RPi to expand it further. I also have a Bluetooth module I can interpose here to communicate with it, with no additional work.
The little board top left is an accelerometer with an I2C interface. Using that and the Serial as a ring system, I can run standalone or jumper in a whole range of other hardware.

This gives me at the moment
- 24+9 x GPIO
- 12+1 x ADC
- 1 x I2C
- 1 x Wifi Access point
- 1 x Wifi Static Network
- 1 x Bluetooth
- 1 x 160MHz main core
- 2 x 16MHz parallel processing cores
- 1 x Multi Device Expansion Port
- 1 x Gravity Reference
- Reprogram the parallel cores over Wifi (uses a GPIO per core)
A shout out to Peratech
I've mentioned this stuff before. I bought it years ago when it was experimental, and its become one of my secret weapons. I have 4 of these embedded in the Quad's legs I was going to recover anyway, but I've found the cache I had tucked away.
I thoughtfully bought a whole bunch, now it's vanished into Industry and is hard to come by unless you buy loads of it. Heheh, I kind of saw that coming.
Its pressure sensitive conductive plastic, which is a b*d to make. I've tried, I'll write it up when I have time to make more because it's simple but not as sensitive as Peratech's.
Why's it called QTC?
Quantum Tunnelling Compound pulls a neat trick. It's just plastic, but it has lots of tiny conductive spiky balls like nanoscale chestnut husks embedded in it. When the plastic is compressed these spines interlock, some touch, most just move closer together. The close-together ones transfer charge via a capacitive effect - the electrons jump across the dielectric between the spines when they are close enough.
Progressive pressure brings more of the balls closer together so the resistance decreases linearly as pressure increases.
This, and the accelerometer, are central to the robot being able to balance on one of it's legs.
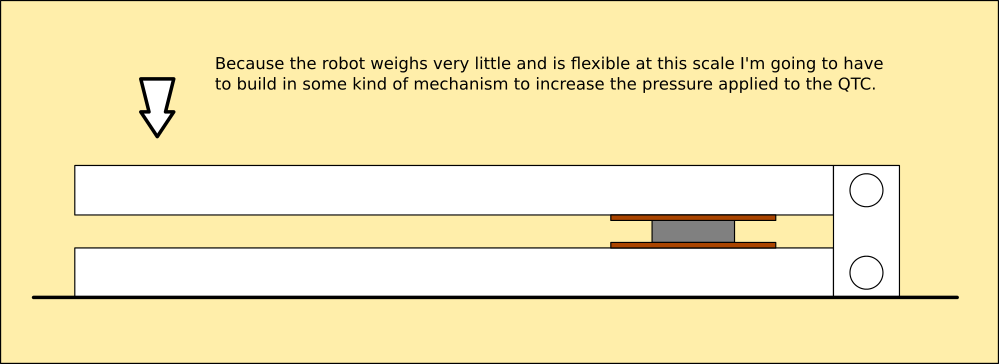
There will be three of these built into each foot, and I think I can get away without using hard plastics beyond the little bits of polyethylene already used. Pinching the QTC between the top of the toe and the ankle tube should be enough to get a clear reading off it.
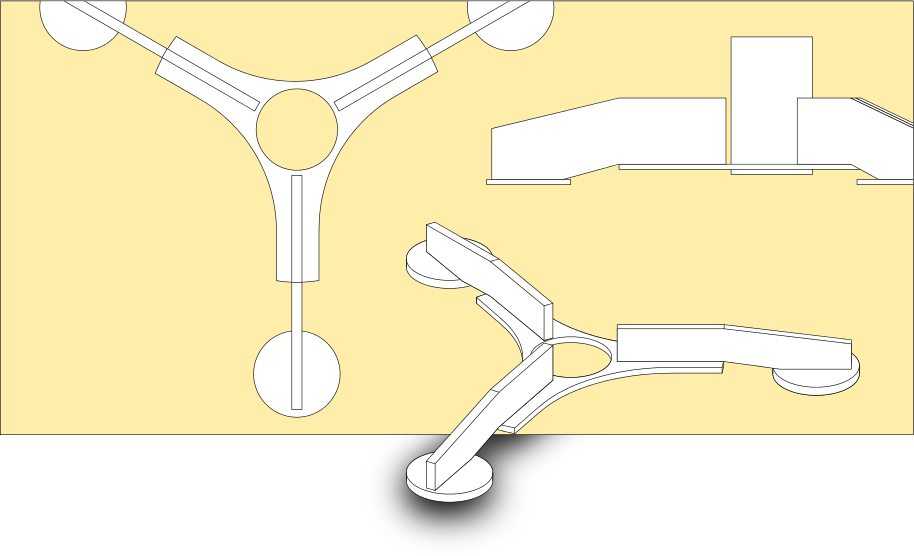
 The toes turned out to be a bit longer than I imagined in comparison to the legs so I've made them a little shorter. Eventually the QTC will be integrated into the ankle skin along with the wiring.
The toes turned out to be a bit longer than I imagined in comparison to the legs so I've made them a little shorter. Eventually the QTC will be integrated into the ankle skin along with the wiring.I've deliberately left a gap so I can experiment with the position of the pinch sensor, which will be a piece of PET with Kapton and foil contacts folded over a QTC Pill and taped; it just slides into the gap between the ankle and toe.

Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.