 Dennis
DennisI decided on the m20 gearhead motors for InspectorBot. They are small but still generate a comfortable level of torque to move the bot. The m20 I’ve selected run at 50 RPMs at 6 volts. The wheels I’ve selected have a 60mm diameter or around a 2.36” diameter. That’s a circumference of 7.4” or 18.8 cm, so at 50 rpms, the bot will travel around 6 “per second or 15.2 cm per second. That is a comfortable speed to control a small bot.
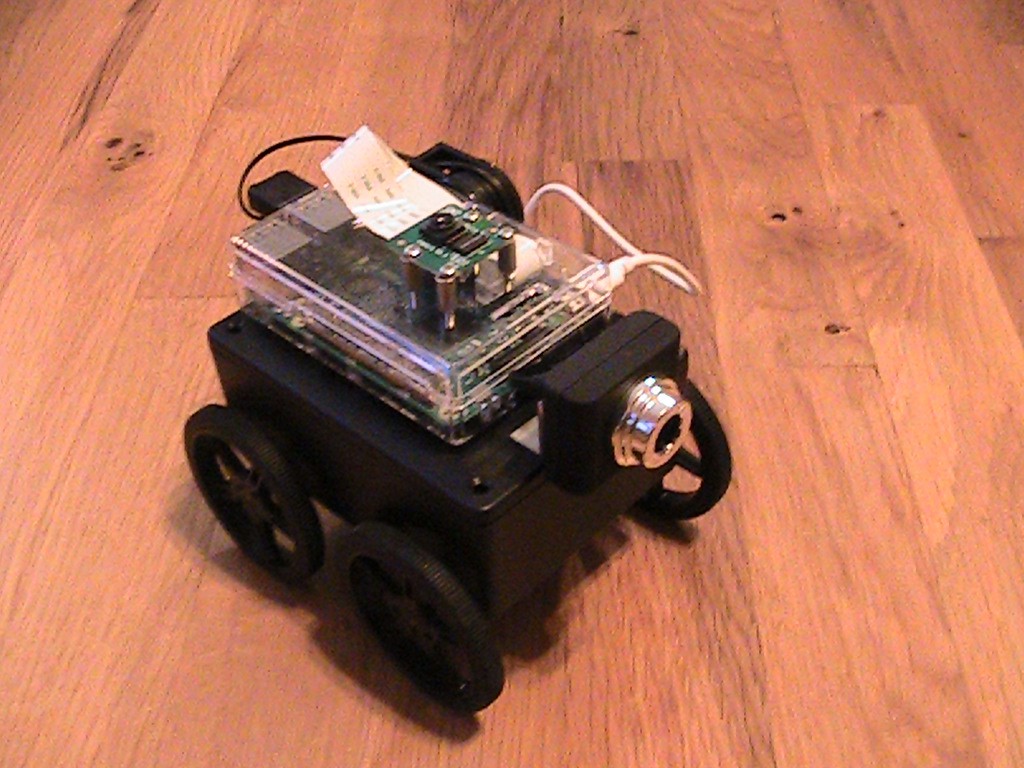
I also wanted to find an easy way to attach the m20 gearhead motors to the robot’s box. I found the Pololu Micro Metal Gearmotor Extended Bracket worked nicely. I’ve added the measurements to the build instructions. Below is how the Bot looks with the new wheels.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.