 Luke
LukeChallenge?
Long commute time. During hot summer days using public modes of transportation can be tiresome.
Solution?
Electric vehicle (no sweat, yay!) smaller than a bicycle, so that you can take it into a bus (or a tram) when it starts to rain.
World changing?
Probably not earth-shattering, but definitely improves one's quality of life. Also it arouses interest in other people ;)
Usage?
Riding the board requires some skill, but it's not that difficult to grasp. Just put your feet on the board, move the throttle trigger on the controller and that's it!

Licenses?
Materials available here (hackaday.io project page), my GitHub page and my personal webpage are licensed under the Creative Commons Attribution-ShareAlike 4.0 International License. To view a copy of this license, visit http://creativecommons.org/licenses/by-sa/4.0/.
Third party licenses:
VESC Hardware is licensed under the Creative Commons Attribution-ShareAlike 4.0 International License.
ChibiOS RT is licensed under GPL3 license. ChibiOS HAL is licensed under Apache 2.0 license.
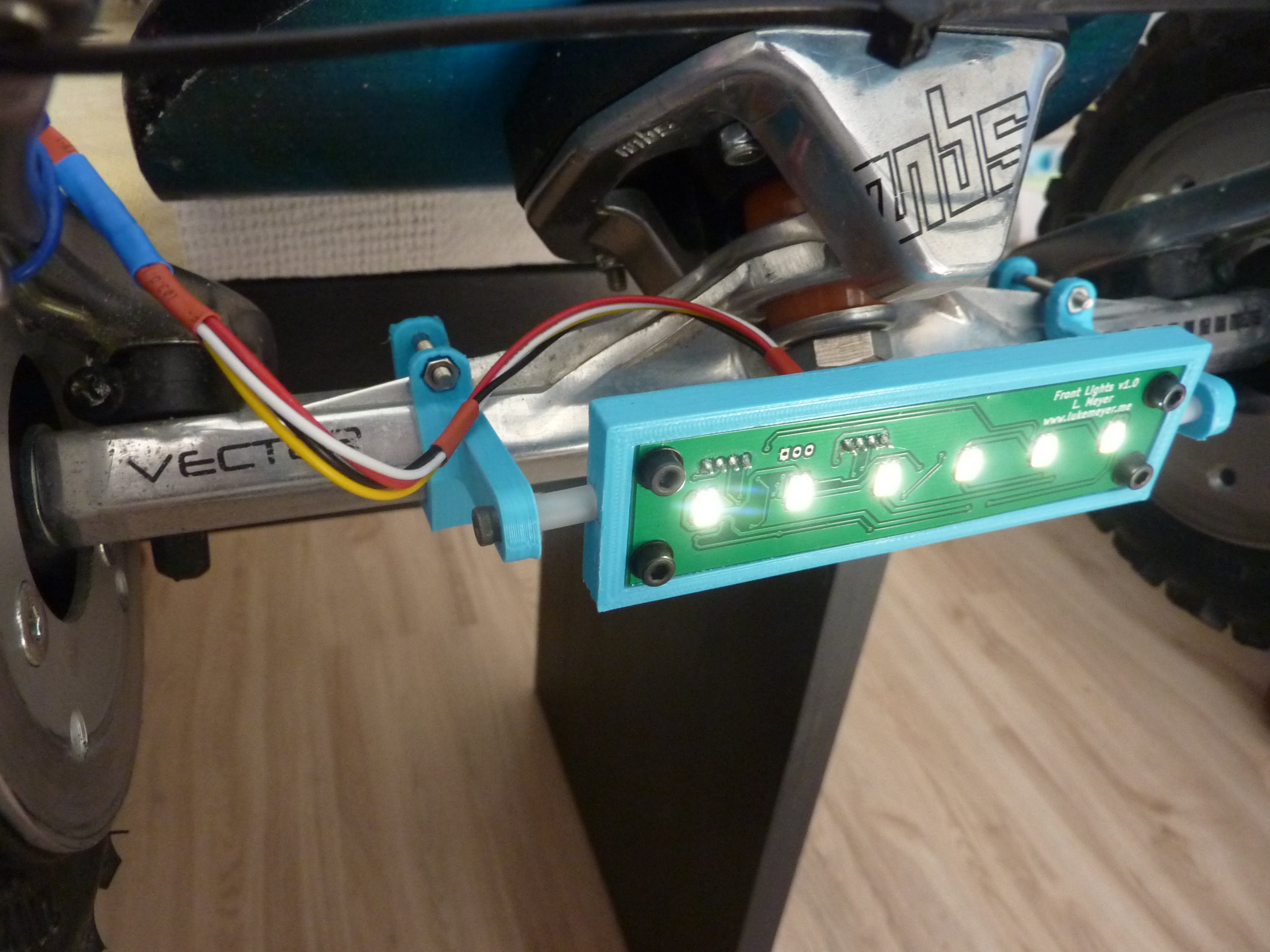
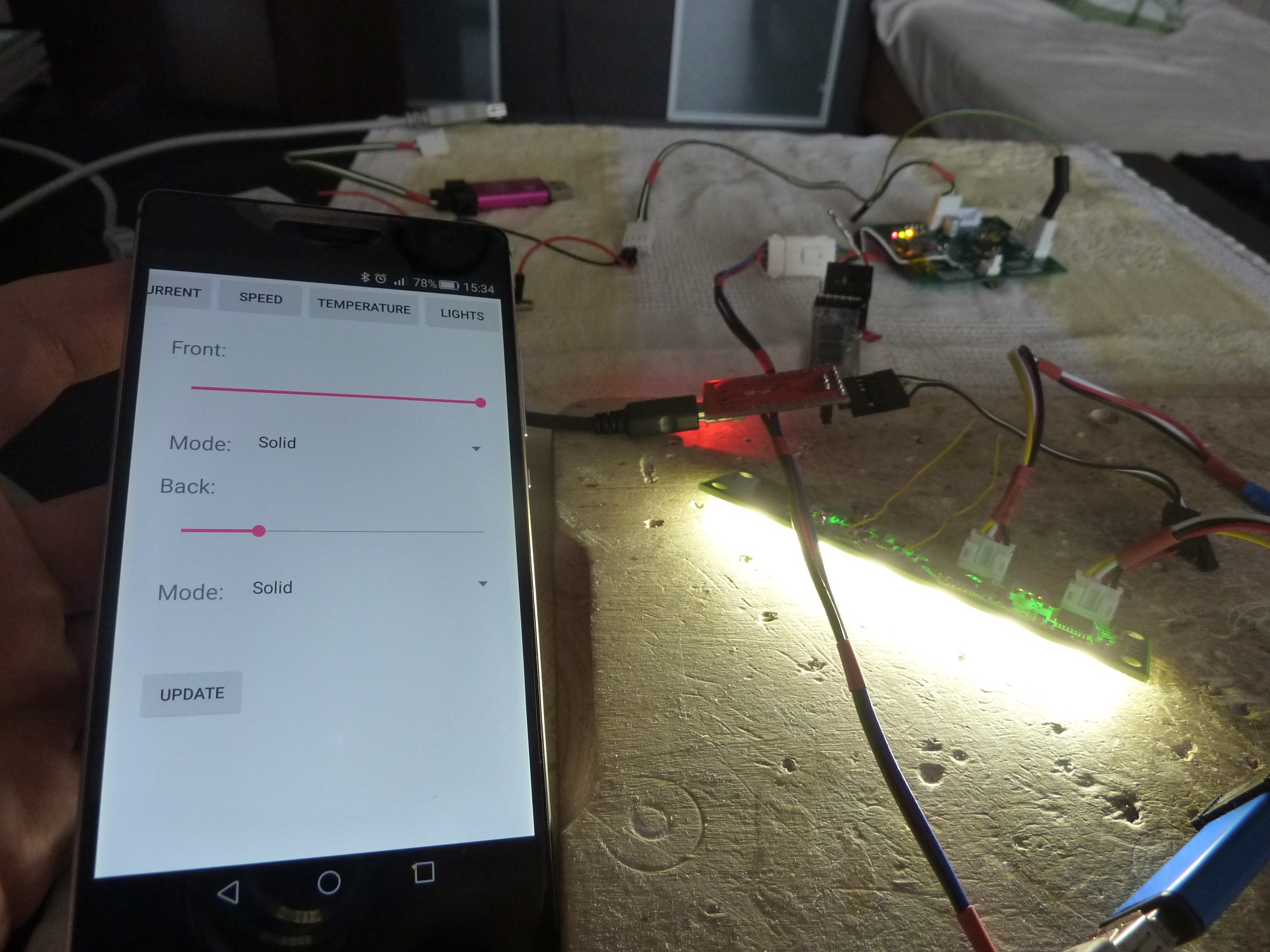
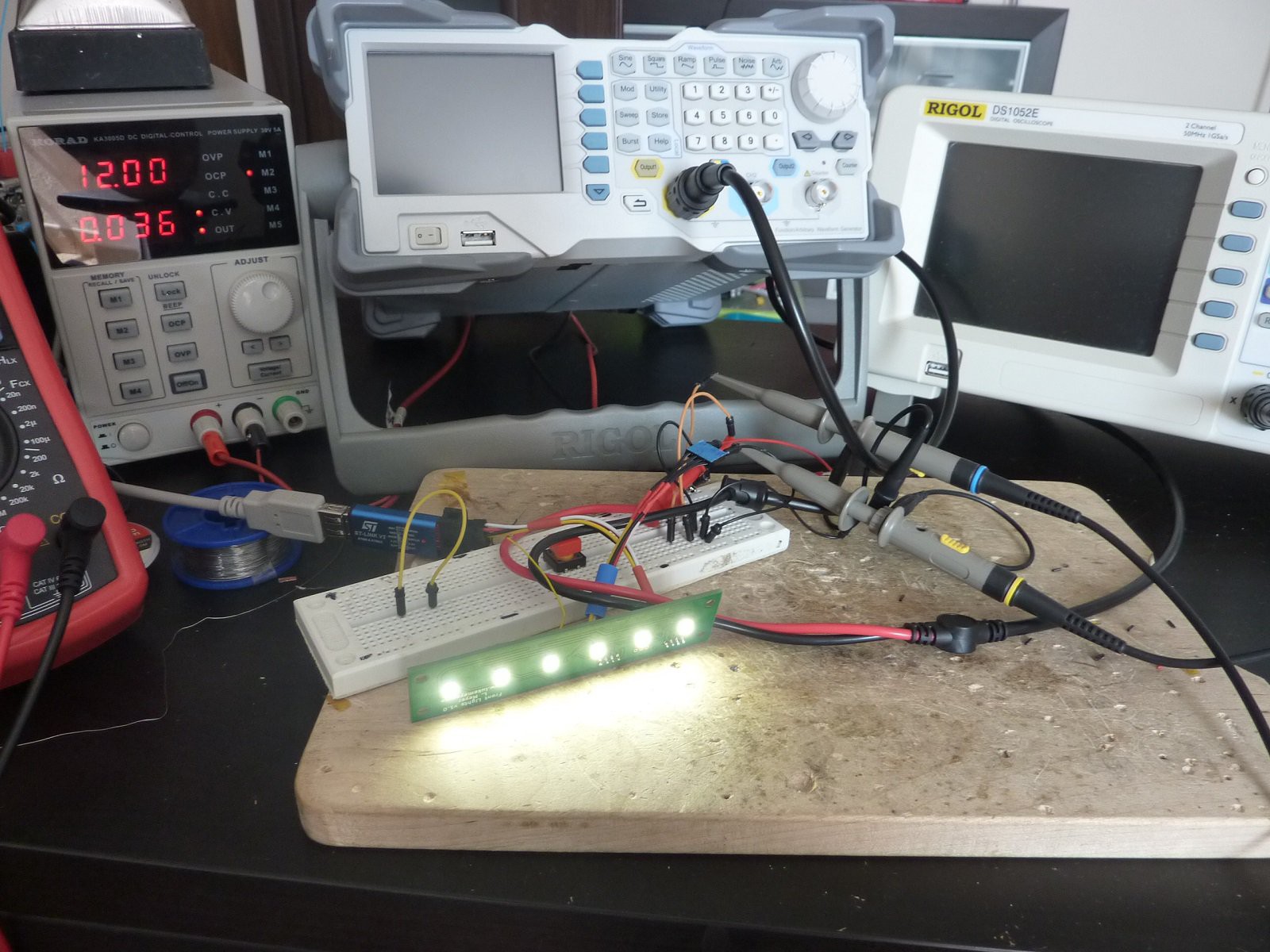
The project is mostly finished and I've regularly used the board for the last few months. So far I've covered around 200km on this board and I can say that it can be used as an everyday way to commute (assuming the weather is ok). Currently I want to assemble and write firmware for Front Lights module (which I will document here, on hackaday.io). Apart from that, I still have a few ideas for minor improvements.
Additional info can be found on project page on my website: http://lukemeyer.me/electricMountainboard.php



 novirium
novirium
 Bob Coggeshall
Bob Coggeshall
 Marek
Marek