 Roald Lemmens
Roald LemmensAfter working at some other projects at home I finally had some time to resume work on this project. As the video shows, the base is functional (but still teleoperated).
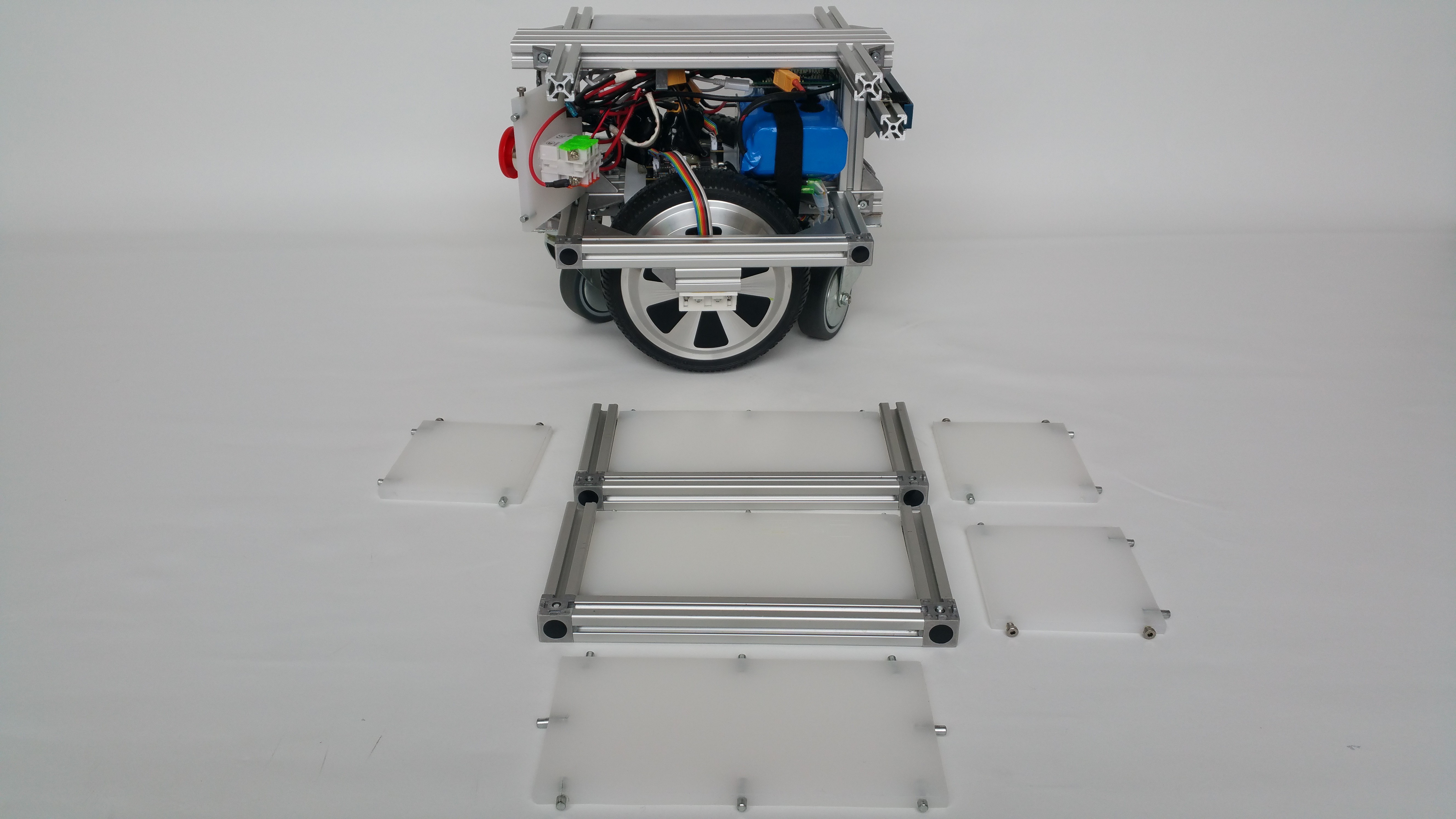
The left and right side panels can be removed by unscrewing the side top two bolts and bottom two bolts with an allen key. I drilled holes in the cube connector covers which allows unscrewing but keeps the bolts in the cube connector so they don't get lost. Also this makes it easy to recognize which bolts to unscrew. By using this configuration the bottom T-slot bar always stays fixed to the robot and the wheel sensor with it. This prevents recalibration each time.
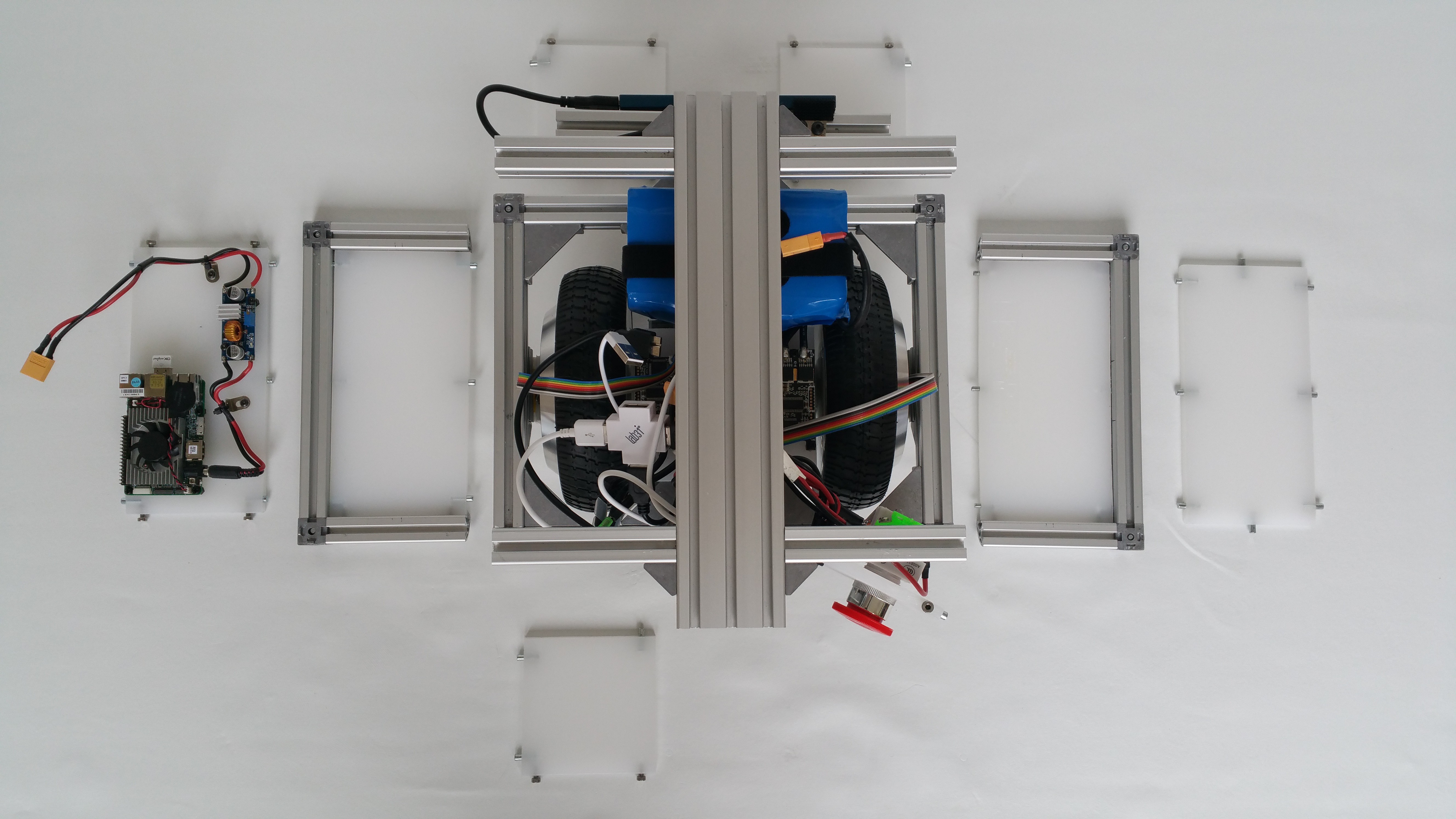
After removing the main side panels other panels can be removed without tools. Each small side panel can rotate out or taken out completely. The two VESC's are mounted on a polyethelene board in the center together with the battery and power distribution board. The computer (Up board) is mounted on one of the top boards, together with its DC-DC converter.
I used a smaller 4 port hub this time, because the space was too limited for the 10 port hub I used before. I figured it would make more sense to go with distributed hubs for the top of the robot anyway, instead of routing all cables to the base.
One of the small sidepanels provide a emergency stop, charge connector and power switch for the computer.
Next step is mapping and autonomous navigation. For this to work I will need to update the robot description (urdf) and implement sensor fusion for the gyro and odometry using the robot_localization package. Then I can attempt to build a map using gmapping.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.