 Kris Winer
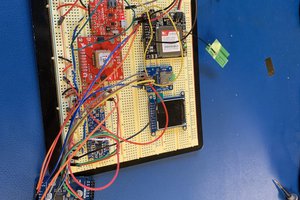
Kris WinerThe board uses an STM32L433 Cortex M4F host programmable via the USB connector using the Arduino IDE and an Arduino core created by Thomas Roell.
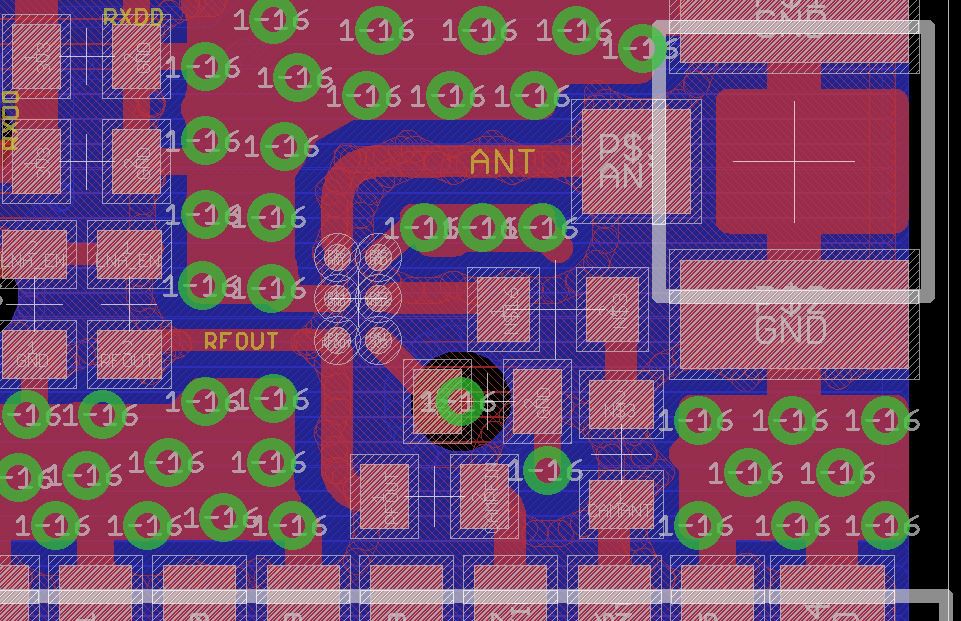
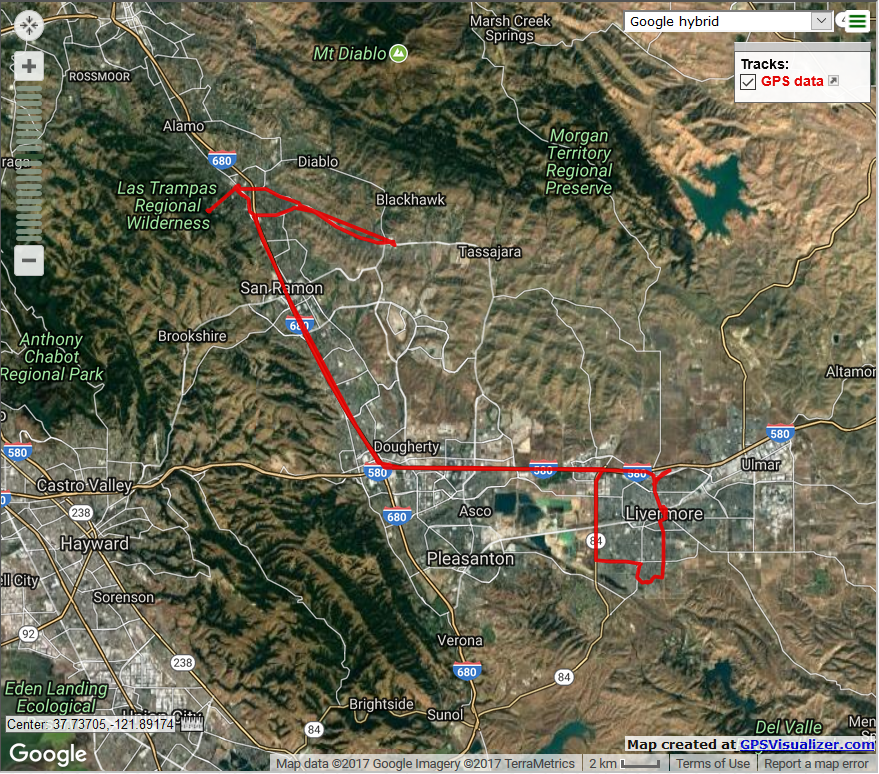
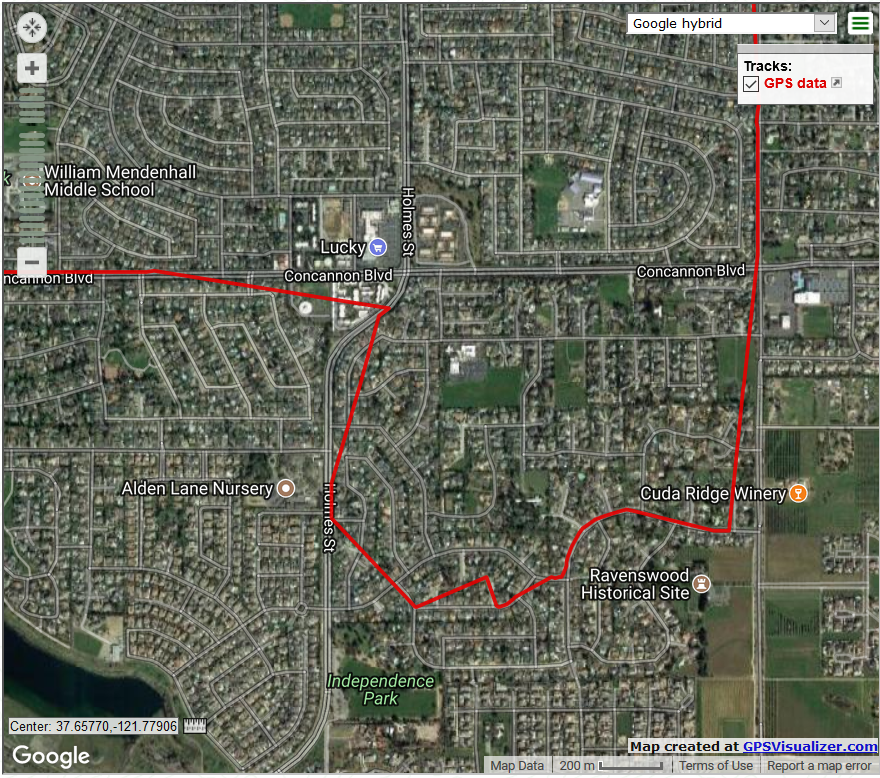
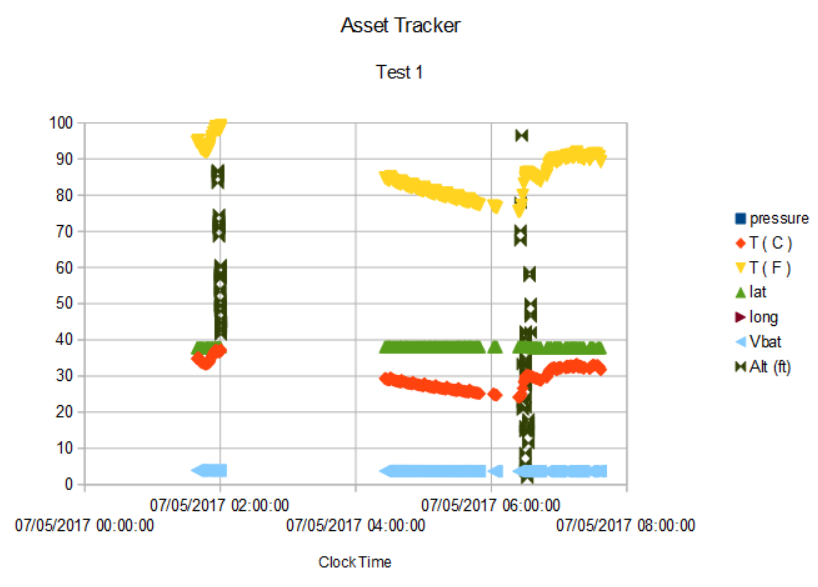
The absolute position engine is a UBLOX CAM M8Q concurrent GNSS module connected to the STM32L433 via UART. The CAM M8Q uses a chip antenna so no external wire or patch antenna is required resulting in a very convenient device package. The pcb is an integral part of the CAM M8Q antenna and the pcb has been sized to meet the minimum ground-plane size recommendations (20 mm x 45 mm).
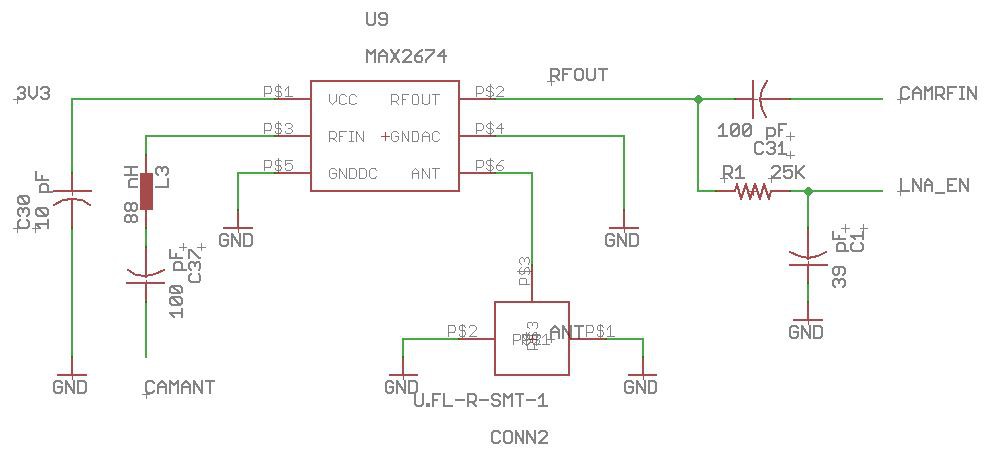
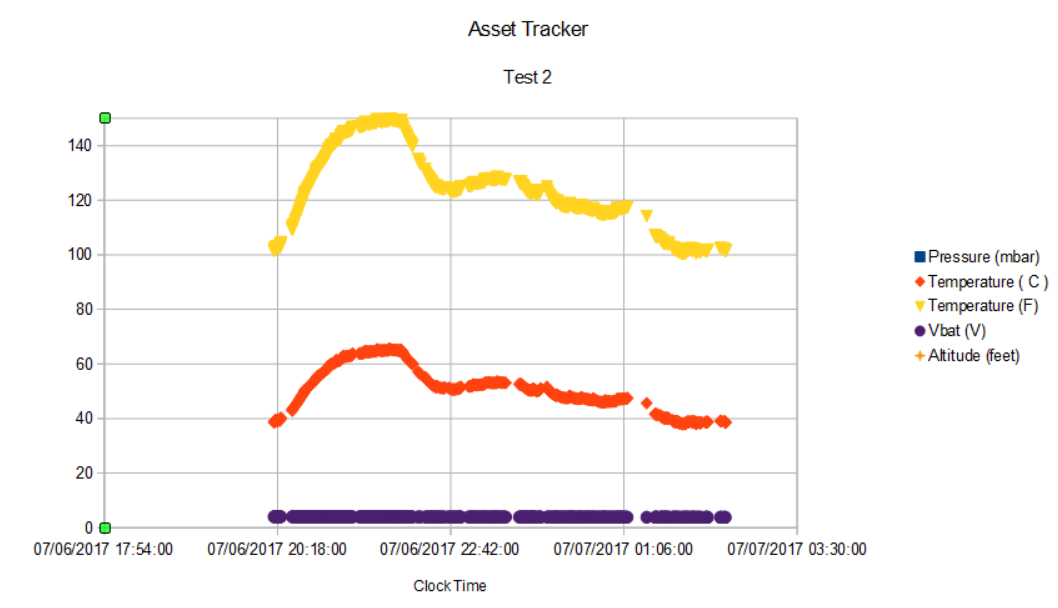
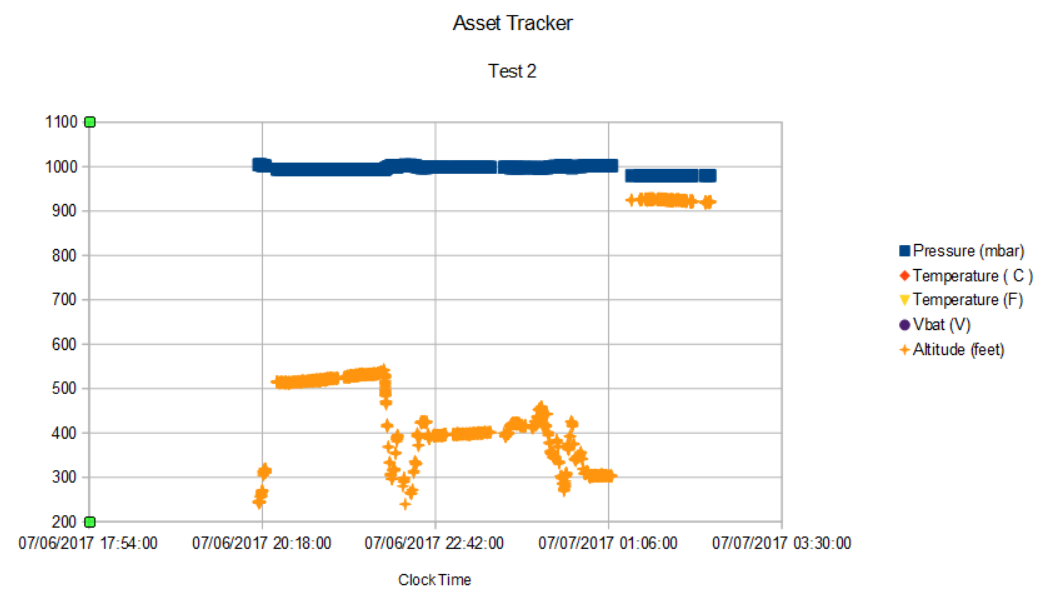
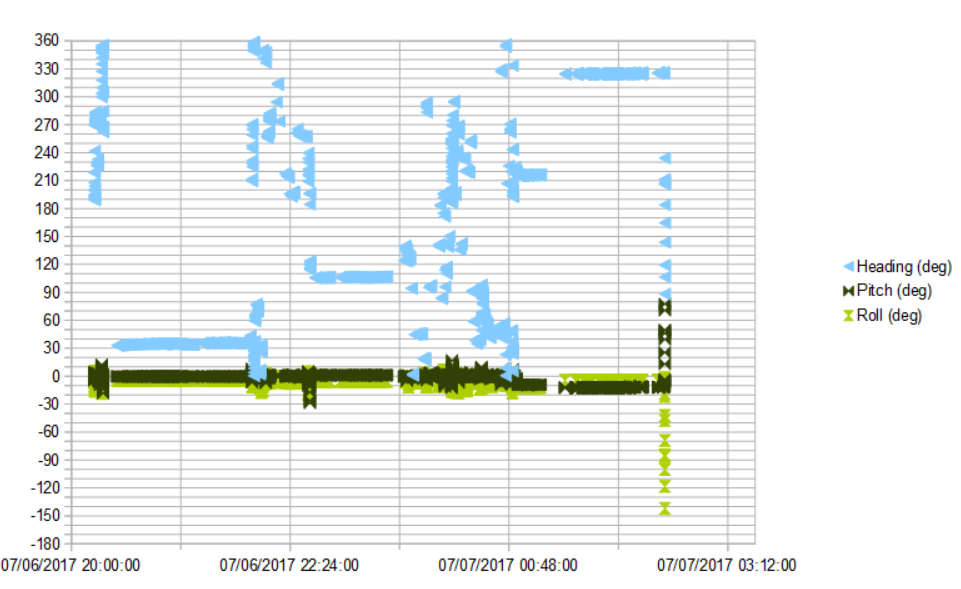
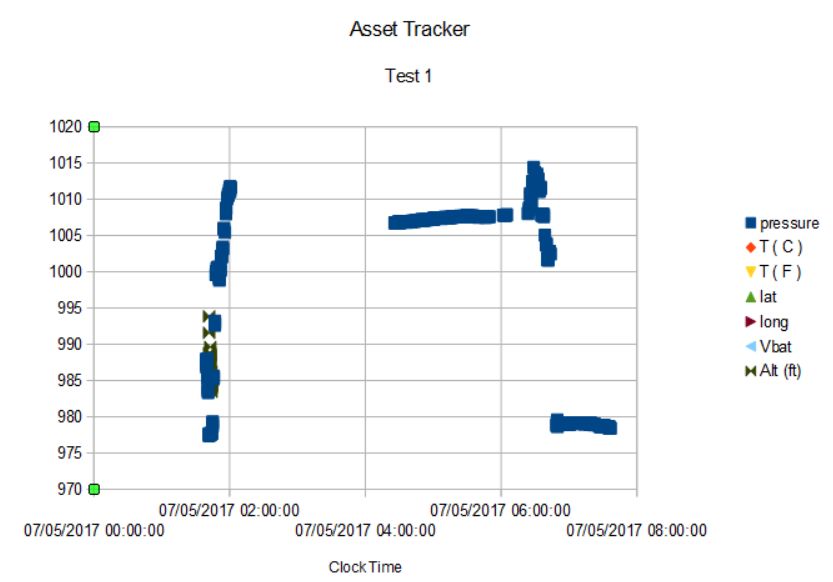
The absolute orientation engine uses the MPU9250 accel/gyro/magnetometer IMU sensor plus the MS5637 barometer as slaves to an EM7180 motion co-processor that sends quaternions and drift-stabilized altitude to the host via I2C.
The EAGLE design files are available on OSH Park shared space.
There is an Arduino library and sketch available on github.




 jan.marcinowski
jan.marcinowski
 mikrotron
mikrotron
 Rusty Jehangir
Rusty Jehangir
Hallo Chris, what a great project! I am studying medical engineering and I have a test project with a MPU9250 in combination with the SENtral EM7180. In my case the SENtral can not become Magnetometer data. The function: "void readSENtralMagData(int16_t * destination)„ delivers no data, just 0 for mx, my ans mz. What can I do to avoid this? What is the correct way to become Magnetometer data from the EM7180?