 Arcadia Labs
Arcadia LabsI just updated the GitHub repository with the Android remote interface file.
It uses the free Kewlsoft Bluetooth Electronics app, a nice tool to build bluetooth interfaces in no time, by sending simple serial instuctions to a Bluetooth client (the arduino HC-05 module in this case).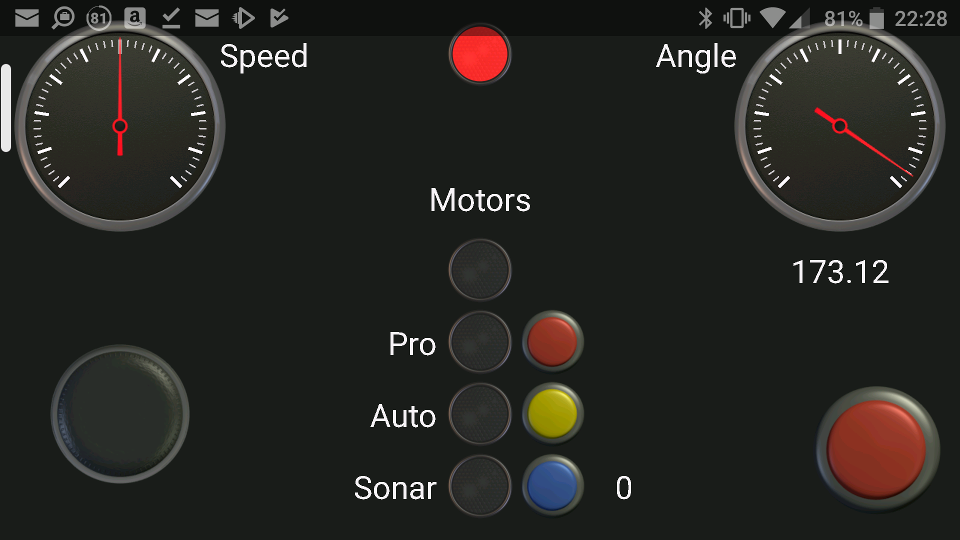
Controls
- The joystick on the left controls the robot
- The big red button on the right triggers the servo arm
- The little red button in the middle triggers pro mode on and off (be careful !)
- The little yellow button in the middle triggers the autonomous navigation on and off (if the robot is equipped with a IR sensor)
- The little blue button in the middle triggers only the distance measurement on and off
- Two big indicators show robot speed and angle
Installation instructions are in the project's GitHub android folder.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.