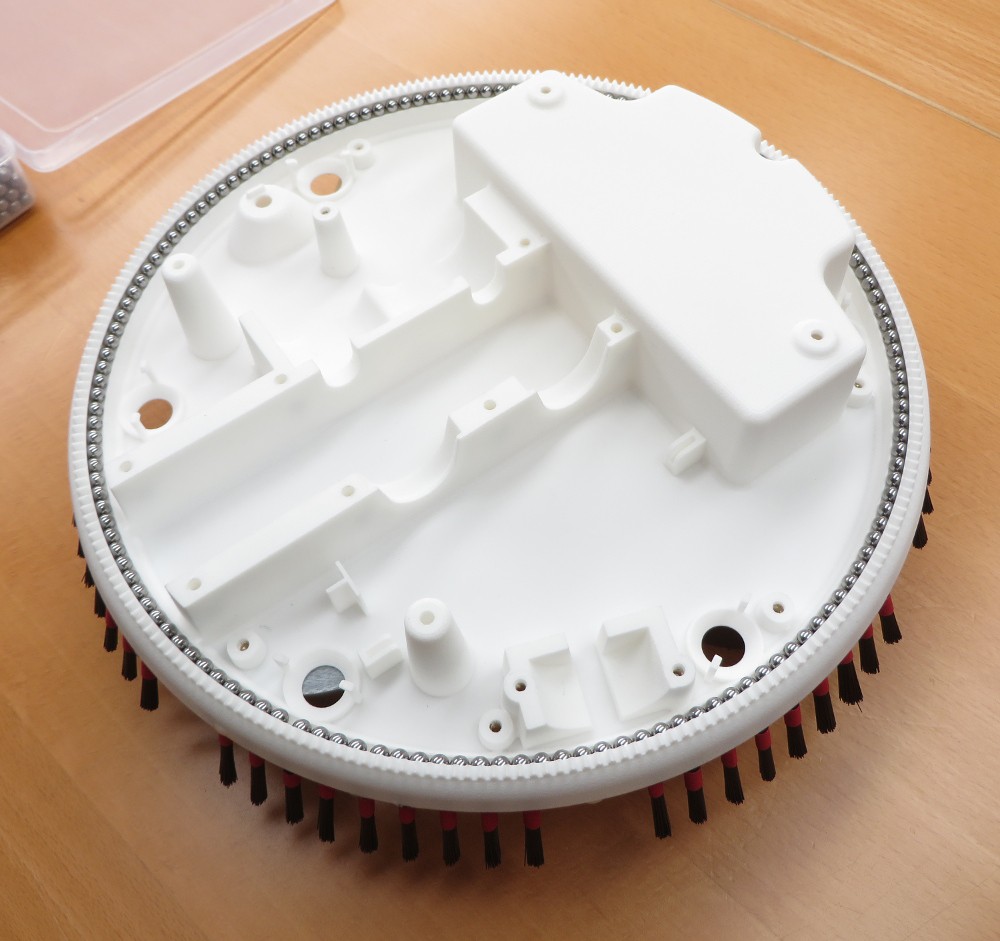
So below some more bits on the mechanical assembly, the internal layout of the spools and drives.
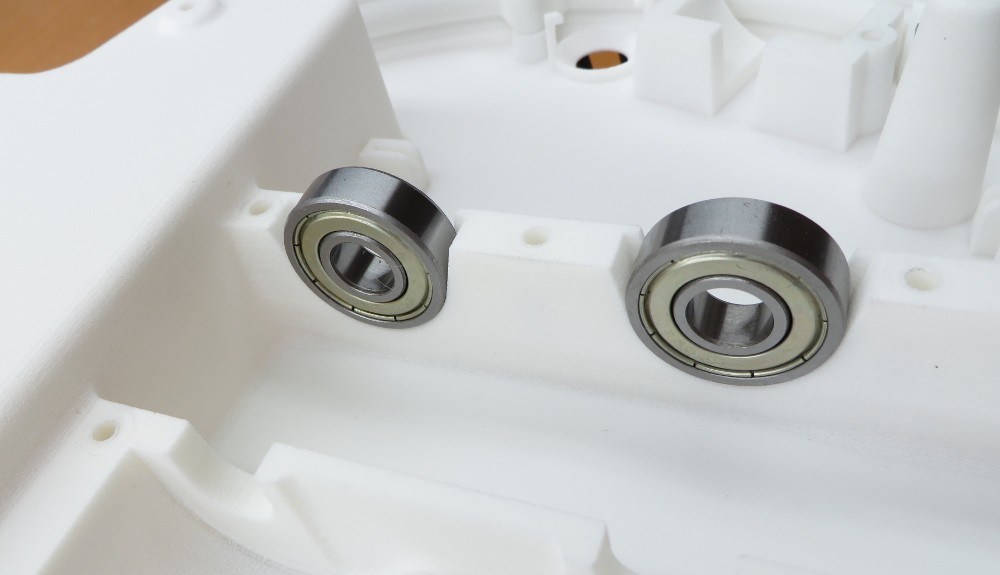
Bearings fit just fine.
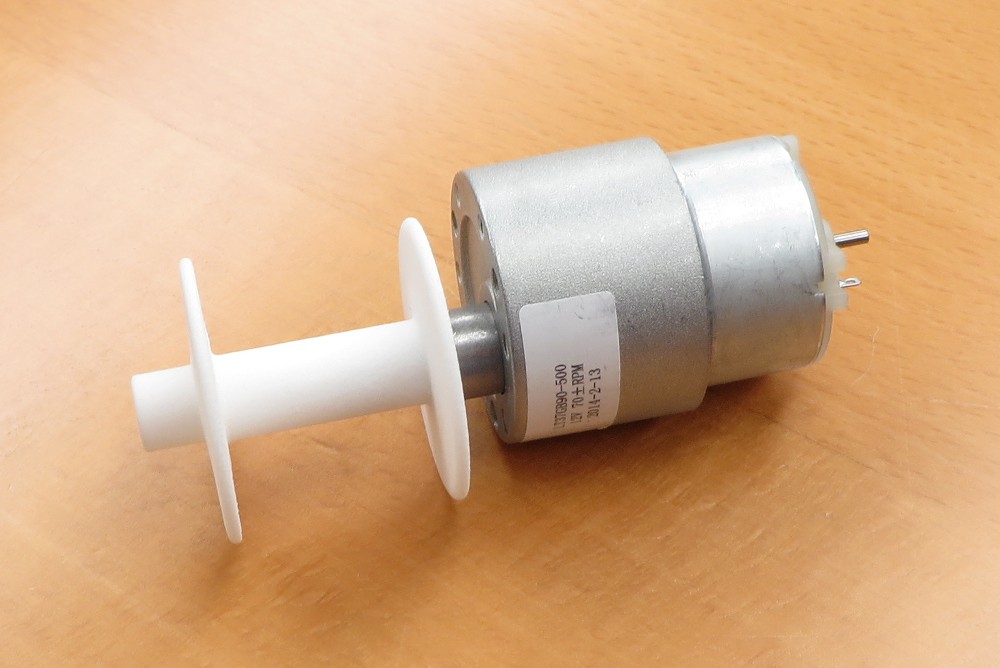 I chose these 37mm DC motors for the prototype because they are available off the shelf in a decent amount of ratios and power ratings. They seem to be pretty sturdy as well. The relatively low power density keeps them from overheating under continuous use.
I chose these 37mm DC motors for the prototype because they are available off the shelf in a decent amount of ratios and power ratings. They seem to be pretty sturdy as well. The relatively low power density keeps them from overheating under continuous use.
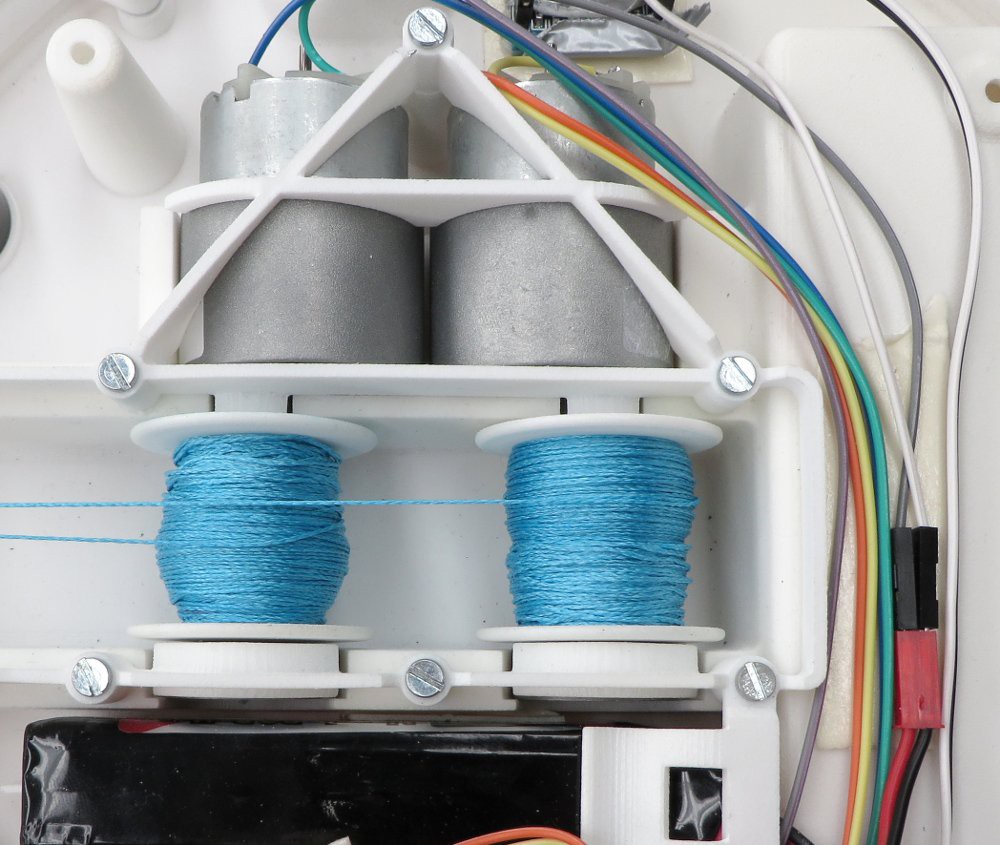
The plastic spools will carry up to 50-80 meters of 0,5mm Dyneema wire and are slightly offset, the rear spool axis being closer to the top of the device.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.