 Radu Motisan
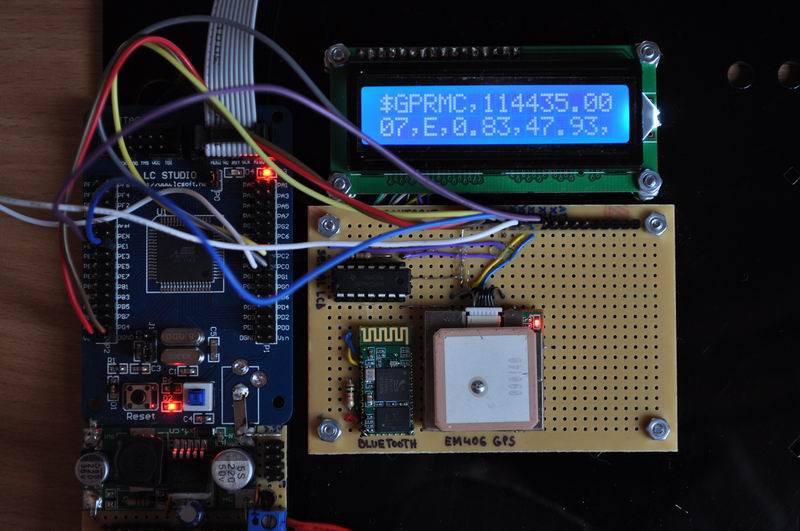
Radu MotisanFebruary 25, 2013: I finished the top board, exposing the bluetooth UART module and the NMEA GPS module. This will be mounted outside the robot's body, to make sure the modules get maximum radio signal. An LCD is to provide vital information such as battery levels and other diagnosis messages.
 And with these last modules, I had to write a considerable amount of software. And this is only the beginning of the long road ahead:
And with these last modules, I had to write a considerable amount of software. And this is only the beginning of the long road ahead:
- HD44780 LCD code . The LCD uses only 3 wires to connect to the Atmega128, using a shift register, 74HC164, to save a few IO pins.
- UART code, to handle data from the UART Bluetooth module and the UART GPS Module.
- GPS NMEA Parser, highly optimized to save memory and processing power. Also available on Google code, here.
And the first problems didn't wait too long to show up. It appears the bluetooth module's RF creates some kind of interference that reduces the GPS signal. As a result, having the Bluetooth module on, I can barely get a GPS fix. When the signal is good (8 satellites in use), turning the bluetooth module on will reduce the signal (3-4 satellites). Here is a demo to show this defect. The red jumper wire is used to power on/off the Bluetooth module. The "sats" value displayed on the LCD is the number of fixed satellites.
So to bypass the issue, I'll need to rework the top-board and move the Bluetooth module at some distance from the GPS module. I was not aware of such a design requirement.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.