 Radu Motisan
Radu MotisanFebruary 06, 2013: The rover's bottom is a thin black plexiglass sheet, that looks great but can't sustain much weight. In this case, the battery seemed a bit too heavy for the bottom sheet, especially considering high speed movements over rough terrain. So I had to build a battery holder using some steel. Hope I won't get to replace all the original rover by the end of this project :) . But this is what perfectionists usually do
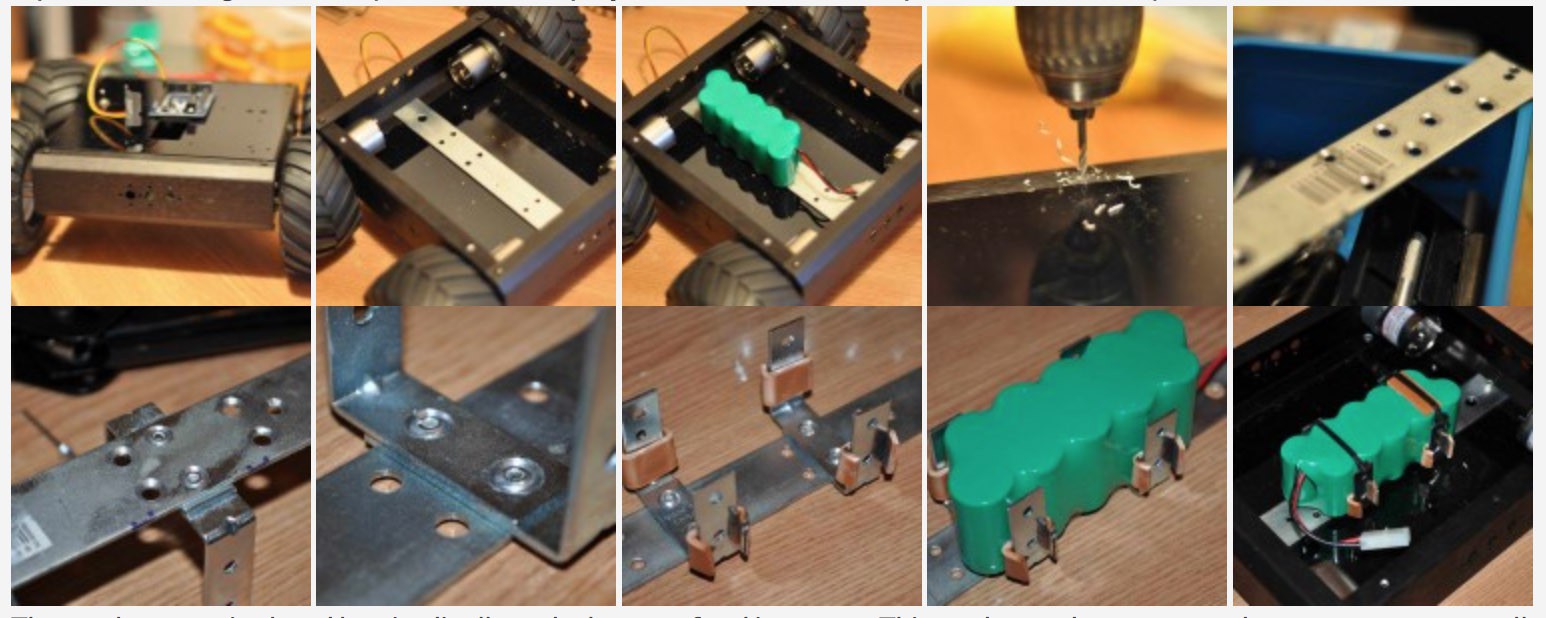
The steel support is placed longitudinally at the bottom, fixed in screws. This can be used to support other components as well, as I drilled multiple holes for that. Two U-shape holders have been fitted using rivets, this way I got no difference in level, and no sharp points to puncture the battery to be placed in this support:
The prominent ends have been leveled with a metal file. The U-shaped holders got some little plastic spacers, made from PVC plastic heated and bended in a convenient angle. With the battery in place, here is the first motor test:
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.