 Phil Handley
Phil HandleyBecause multirotor drones are terrifying, flighty, barely-controlled robots with spinning-blades-of-death on every corner, I decided that it would be a good idea to use something ground-based to test the more autonomous aspects of the project before they go on the drone.
One of the fantastic things about the Ardupilot autopilot project is that, being a well-supported open source project, lots of variants of it exist using the same main codebase. In addition to supporting multirotors and fixed-wing aircraft, there is also a variant called Rover designed for autonomous ground vehicle platforms with great support for typical R/C car hardware. Building a rover not only allows me to test RDF techniques and hardware on a remote vehicle, it also lets me build experience and code for autonomous operations using the Ardupilot platform at the same time.

My requirements for the R/C vehicle used here were pretty minimal - it had to be big enough to carry the APM2.6 + accessories, the Raspberry Pi + SDR and various antennas, and ideally be happy driving on grassy fields. A quick search on eBay brought up a pretty ancient Traxxas Stampede R/C truck for a steal and was quickly purchased. It arrived with a nicad battery, 27MHz R/C system, brushed DC motor and mechanical speed controller. These were quickly (and very cheaply - how did people afford this before Hobbyking?) replaced with the biggest 2s LiPo battery which would fit, an electronic brushed speed controller, and an FrSky 2.4GHz R/C reciever.
After that nothing happened for quite a few weeks as it was actually quite a decent R/C truck, the sort I'd always wanted as a kid, and I was too busy playing with it to turn it into a rover!
Eventually, I designed a mounting plate for the APM, GPS/etc and Raspberry Pi/SDR. This was cut out of 6mm plywood on a CNC mill, and fits on the body shell mounts of the truck. Antennas under test will be mounted on a wooden pole somewhere towards the front, probably with cable ties.
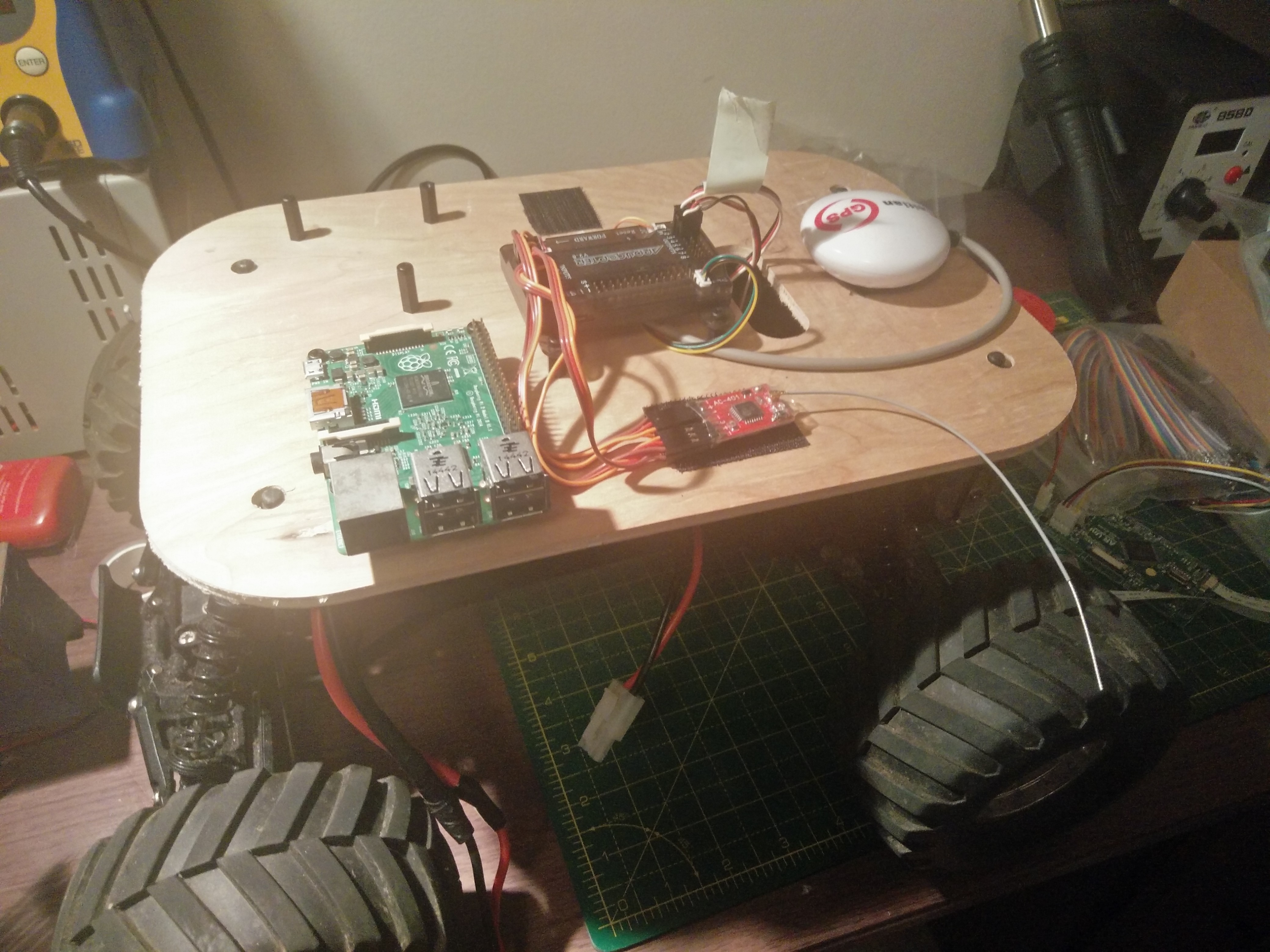
So far it drives well with the R/C passthrough enabled on the APM. Unfortuntately I haven't had the time to take it out to an empty car park or field and play around with the autonomous functions of the APM yet, but am hoping to soon.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.