 RoGeorge
RoGeorge1. Addressed challanges
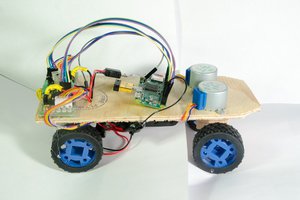
- normal drivetrains with wheels can move in one direction only (without steering). We want a drivetrains that can move in any direction without steering (kind of like the hummingbird)
- elimination of a gearbox, which is too heavy and complex.
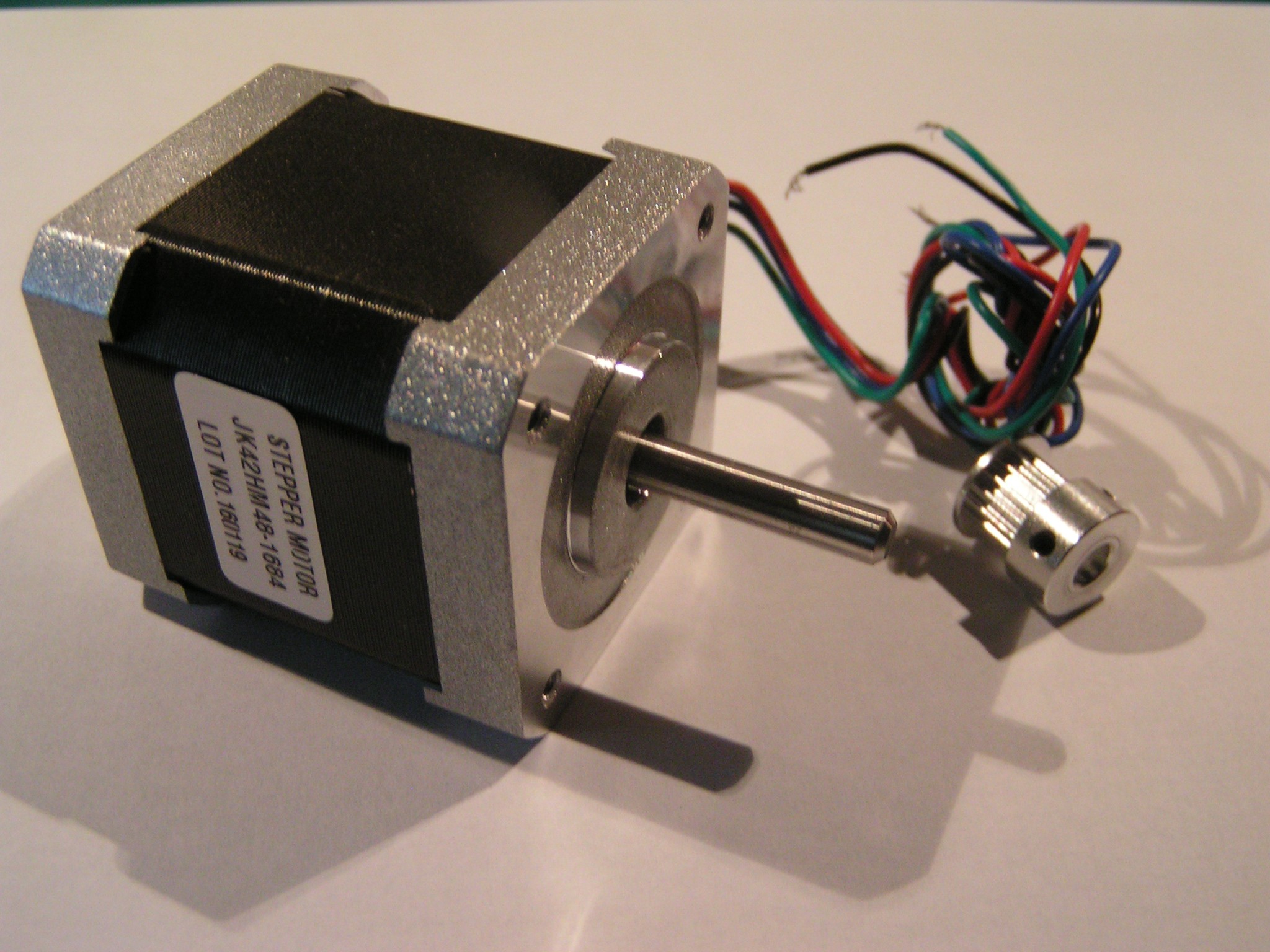
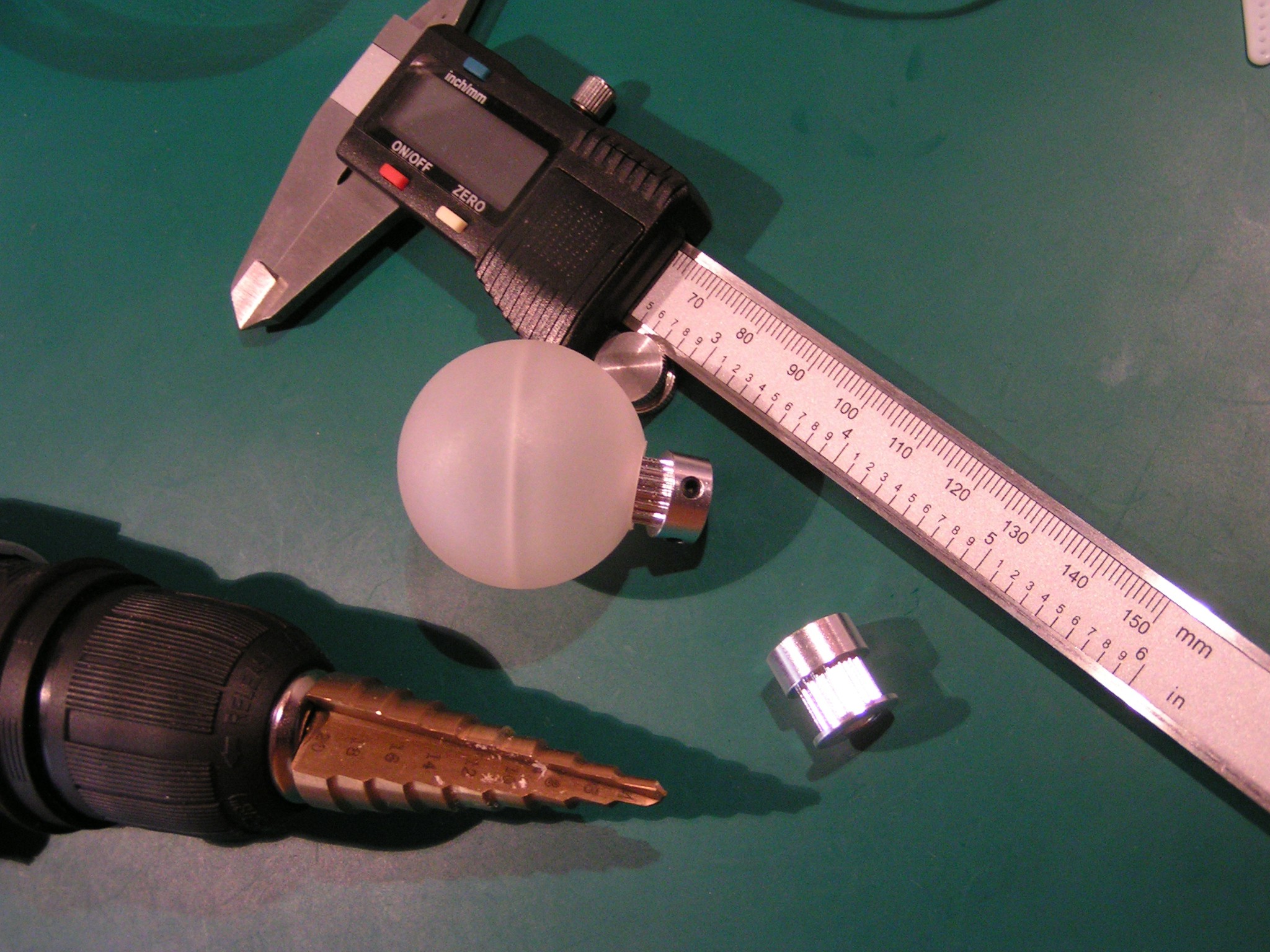
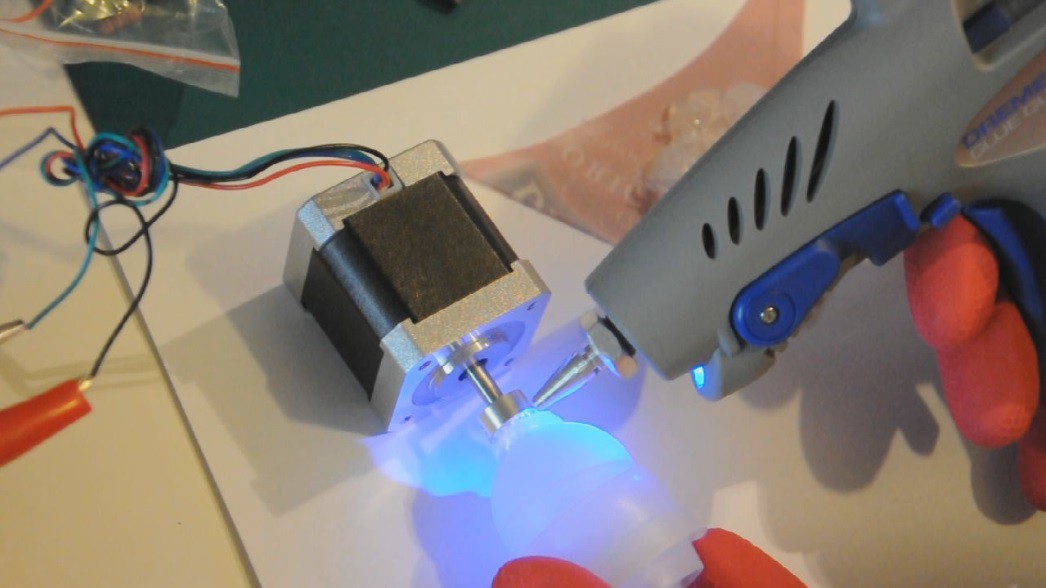
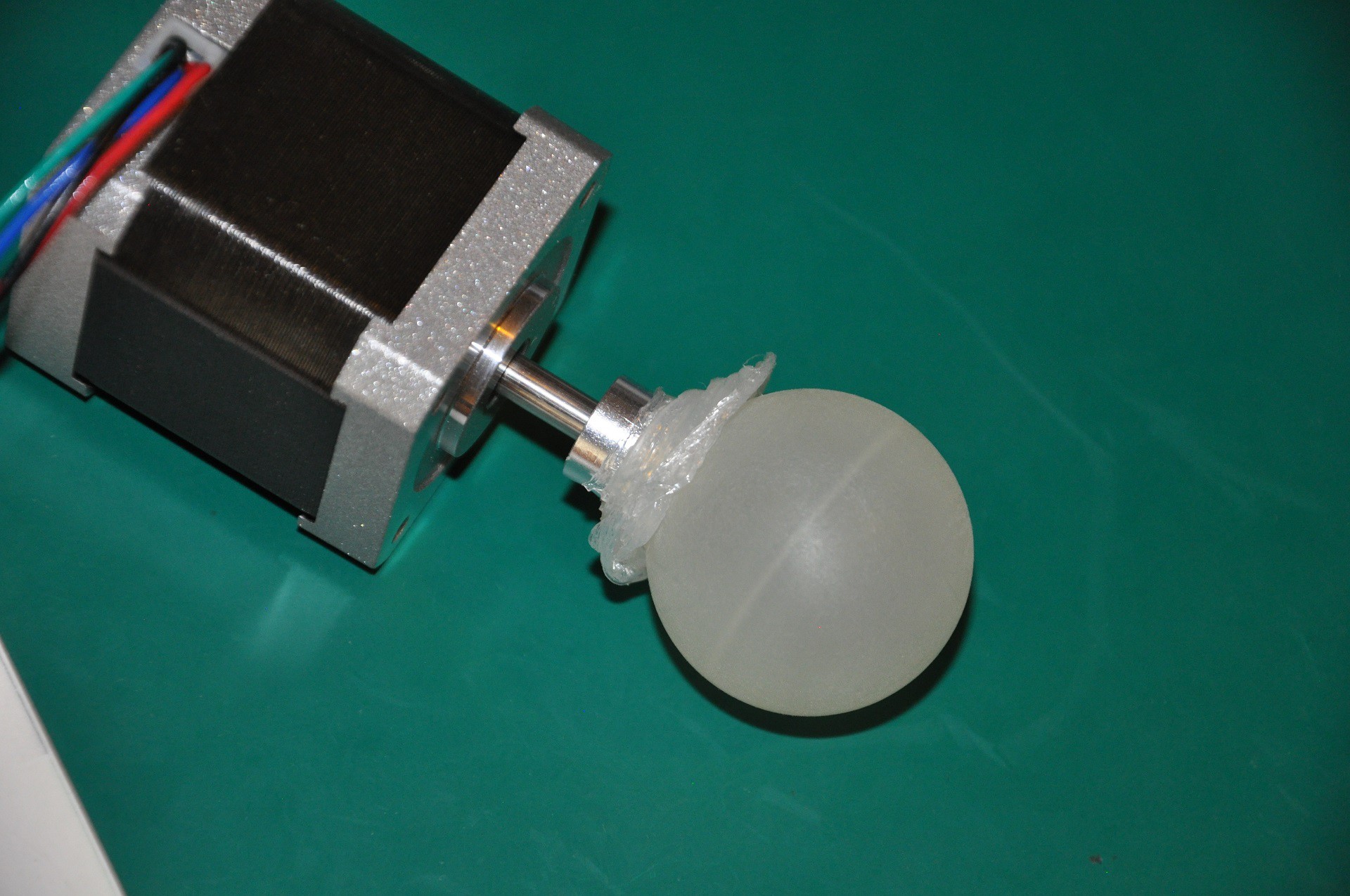
2. Ball based drivetrain can change direction by tilting a ball. This drivetrain does not require a gearbox. It can go continuously from forward to backwards, and in any direction. Also it is direct drive.
3. World changing? Sure! Soon we will have robots on trippin' balls!
:o)
5. GitHub repository: Software not ready https://github.com/RoGeorge/tibi_the_robot_with_balls
6. MIT license, do whatever you want, but please don't blame me.
The basic idea for a tilted ball as an omnidirectional wheel, in order to build a holonomic drivetrain:





 borazslo
borazslo
 Rory
Rory
 Charles Galambos
Charles Galambos
 Jamie Searle
Jamie Searle