 RoGeorge
RoGeorgeGathering parts from all kind of electronics scrap for a PoC (Proof of Concept) is not the brightest idea, especially when there are only a couple of days left until the deadline.
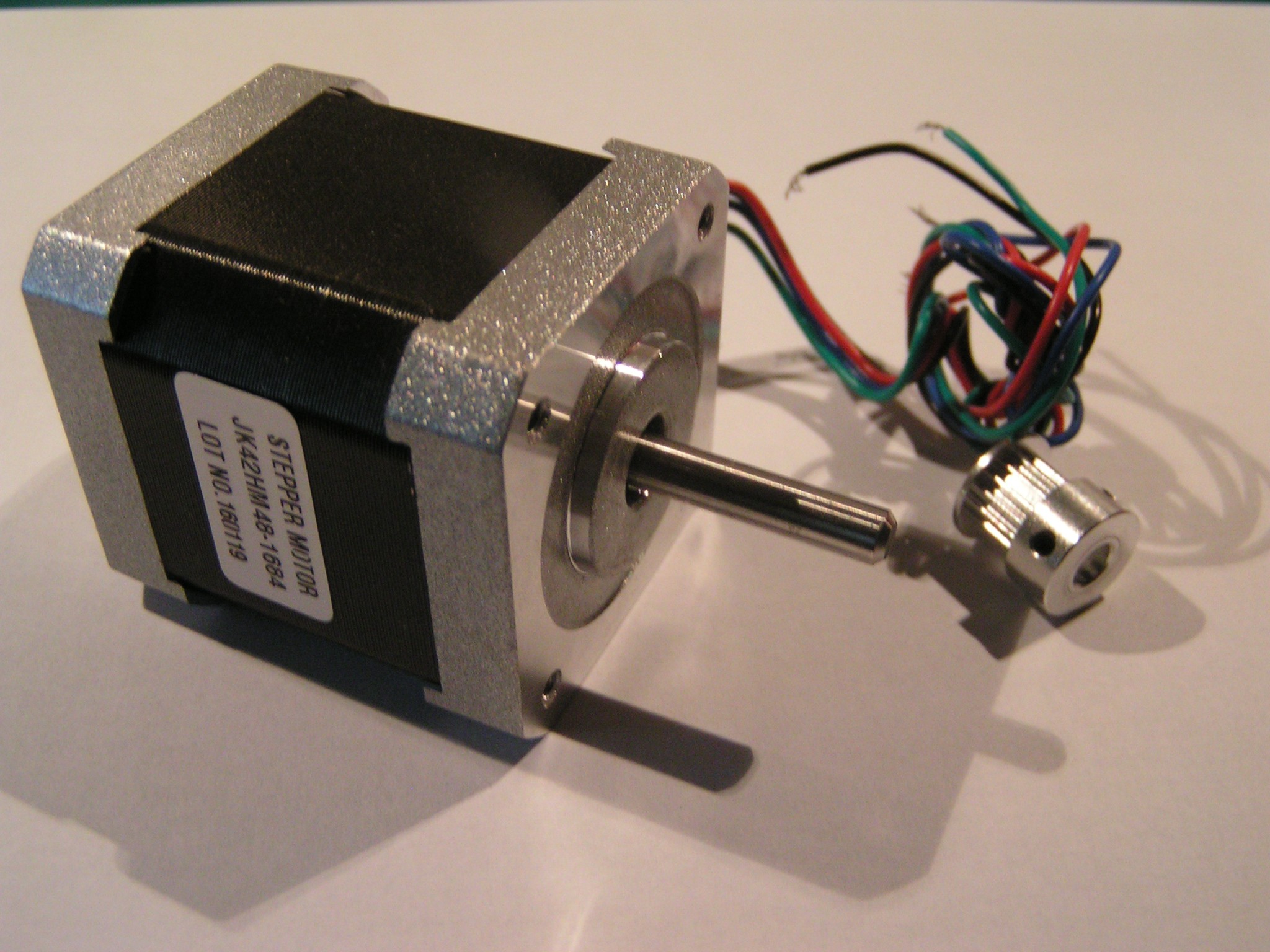
Decided to use good quality stepper motors (0.9 degree, 1.68A, 4.4Kg.cm, 3000rpm, 42mm, 2phase hybrid stepper motor NEMA17) and other parts that were destined to a 3D printer.
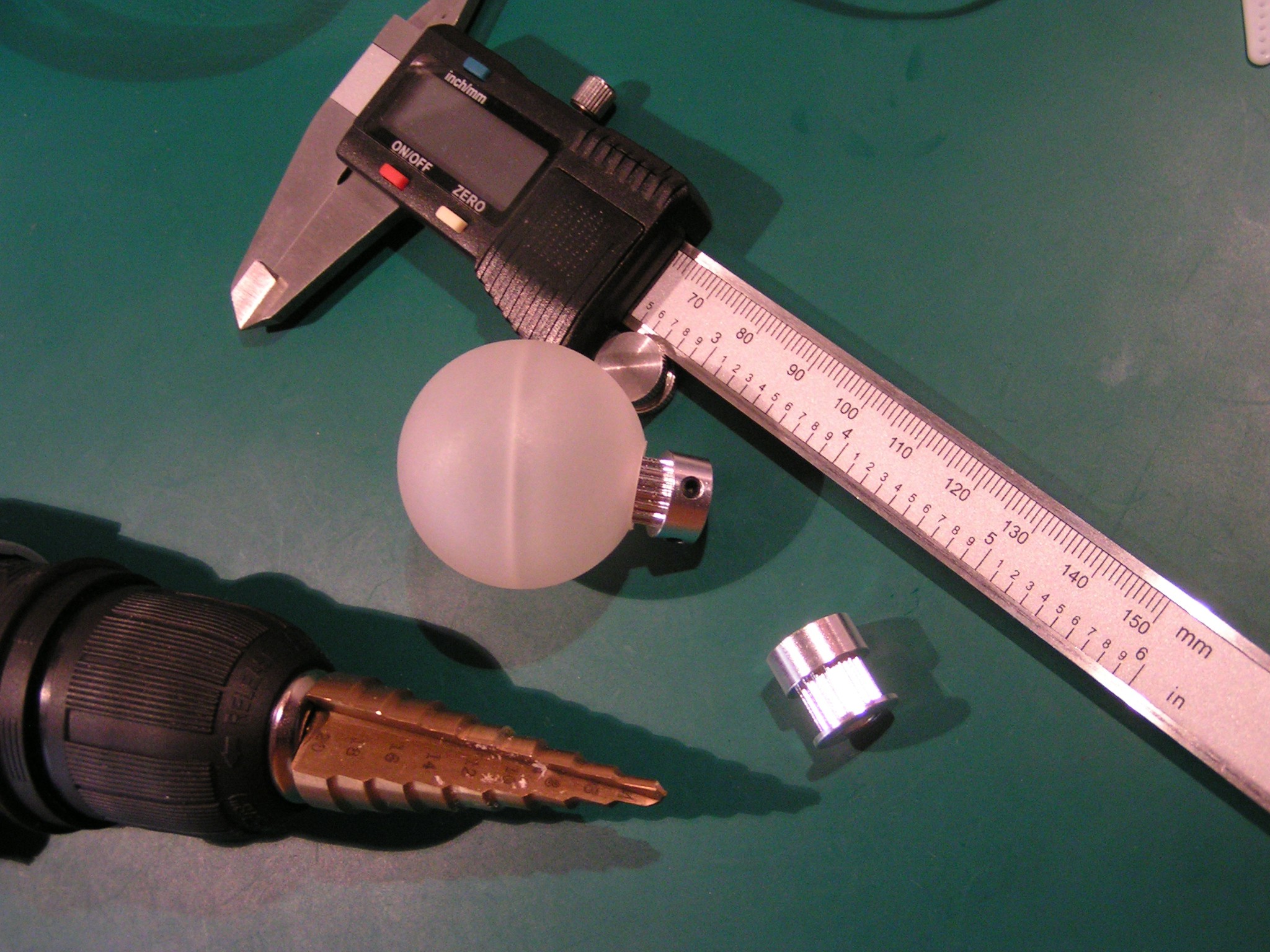
Even so, centering a ball on a motor axle is tricky.
I didn't want to use a glue that can not be adjusted. First try, was with a hot glue gun:
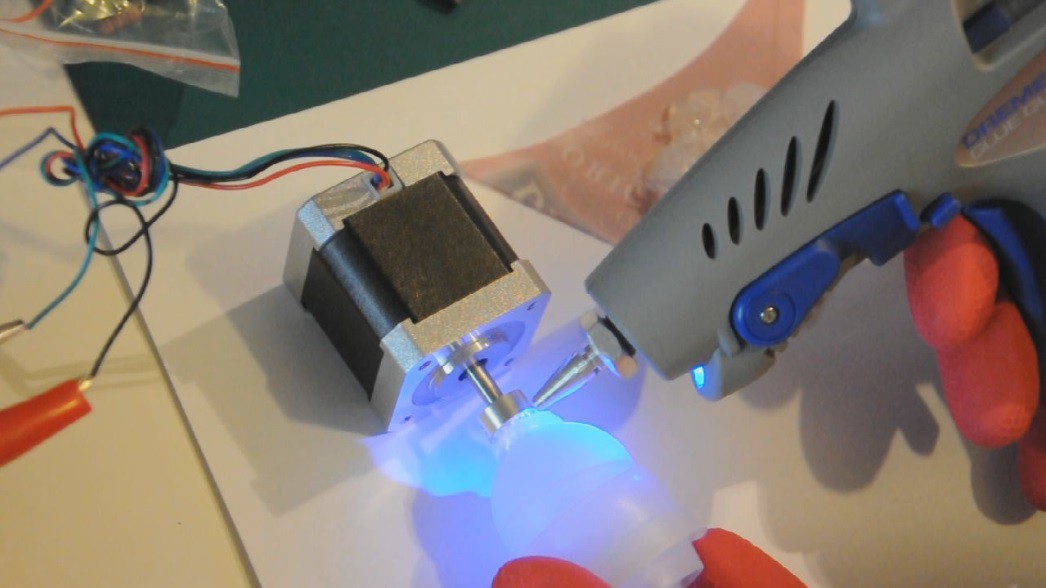
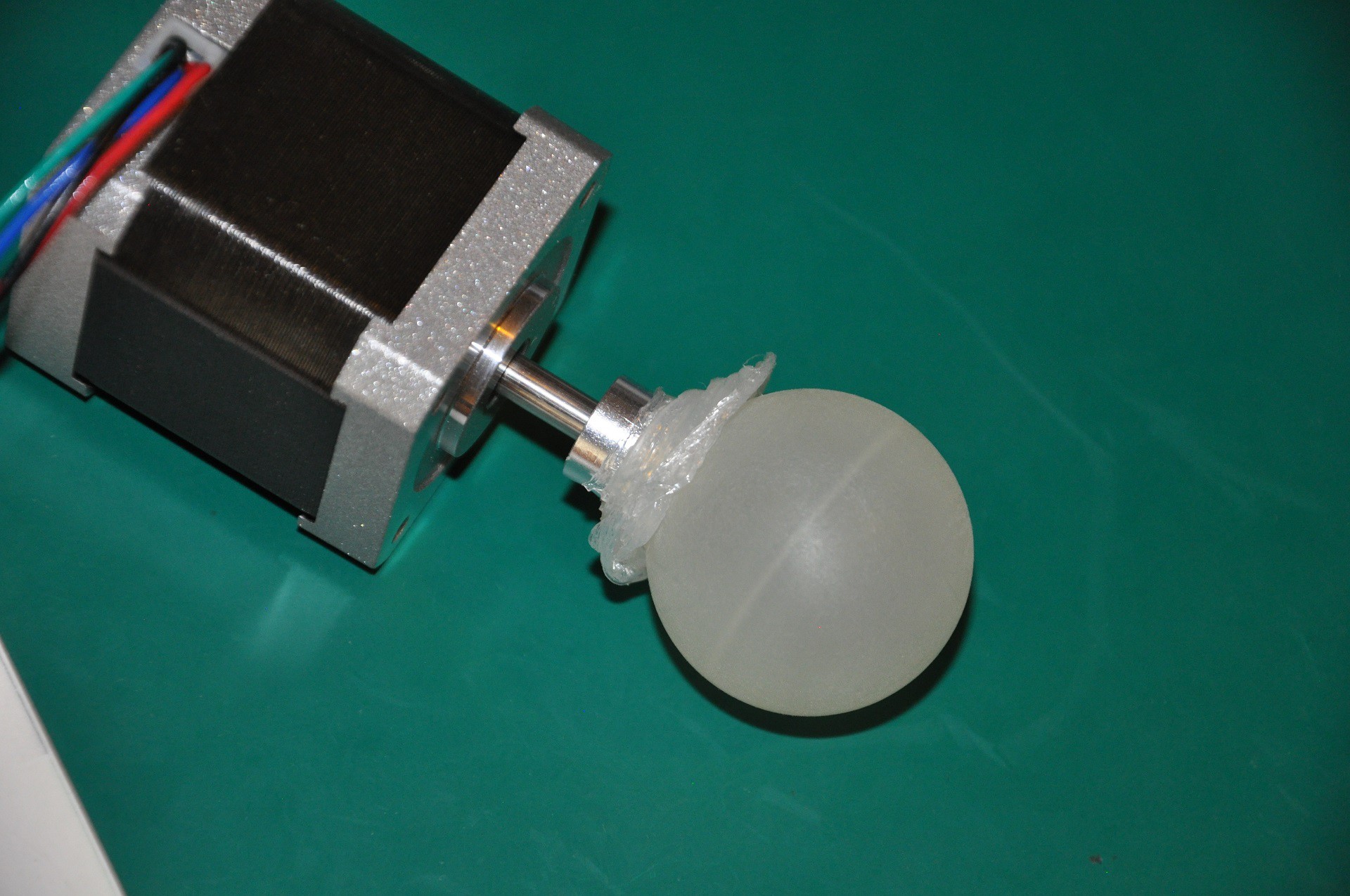
It works, but it's not perfect. The good side is that the resulting joint is slightly elastic, protecting the motor shaft from shocks. The bad side is that the hot glued plastic can be easily pealed off by hand:
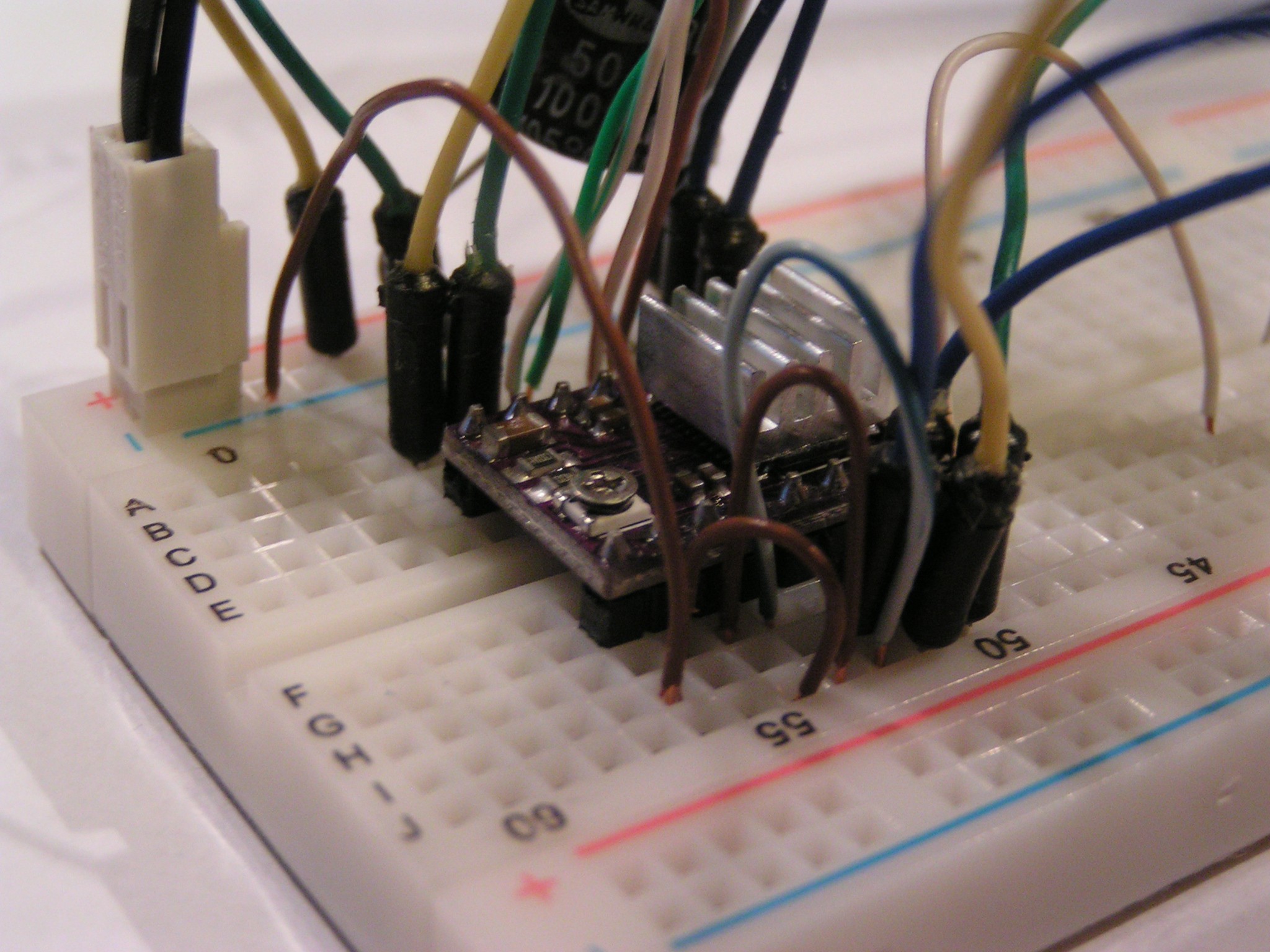
Standard stepper drivers (DRV8825) to control the stepper motors:
Three synchronously tilted balls should be able to drive a platform in any direction based on this idea:
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.