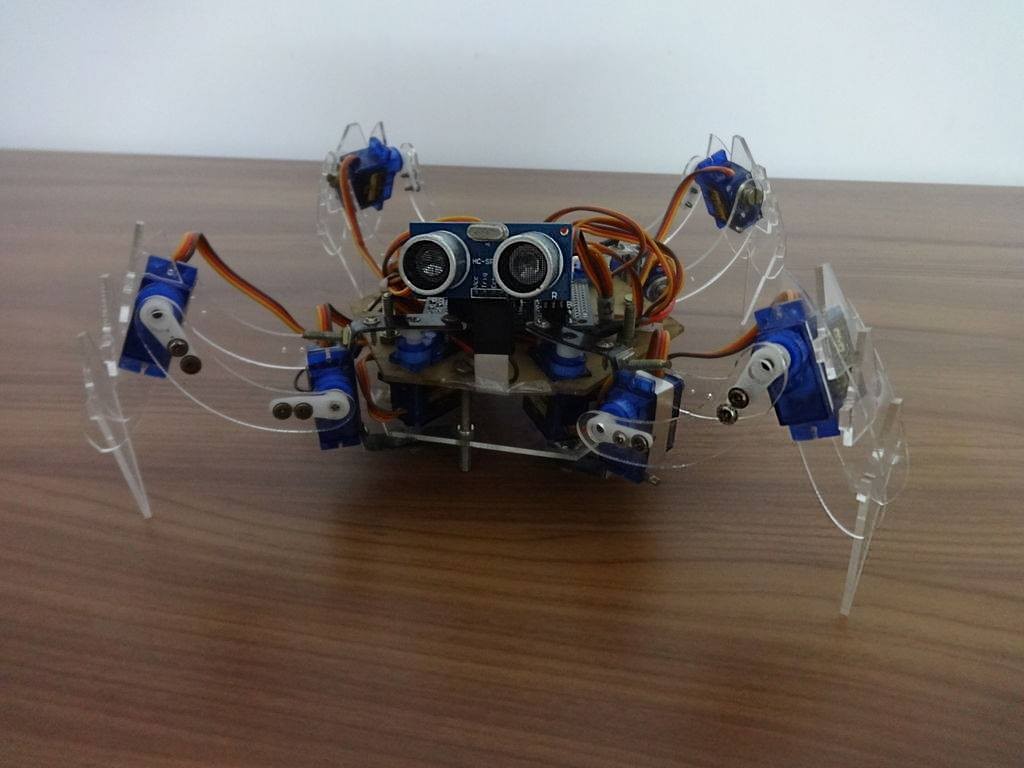
Quattro is a quadruped that we developed that can do several things.
- Made with acrylic for maximum strength.
- Designed to look like a spider.
- Coordinates it's movement with 12 micro servo motors.
- Obstacle avoidance capability.
- Fully autonomous capability
- Last but not least a very skilled dancer, follow on to know more.













 Pascal Buerger
Pascal Buerger
 Shifty
Shifty
 Patrick Joyce
Patrick Joyce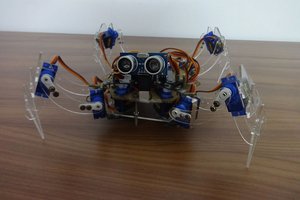
 kousheek
kousheek
I think you should give her a first name - Suzy. :-)