 Dan DWRobotics
Dan DWRoboticsTonight's efforts have been centered around experimenting with different control methods.
My GUI is still pretty basic. But I have big plans for it. At present the sliders affect various sets of joints by adding or subtracting amounts to the leg positions. The slider labelled 'Boflex' is the one seen in the video above which makes the legs crouch and rise up. It's a long way from inverse kinematics, but it's the start point. The idea of these movements is to create a set of movements that can be used in conjunction with each other to make more complex movements. When I have found the best movements to combine, I will create a 'sequencer' on the GUI where I can pick various preset movements and play them back in a sequence to make my first 'walk'.
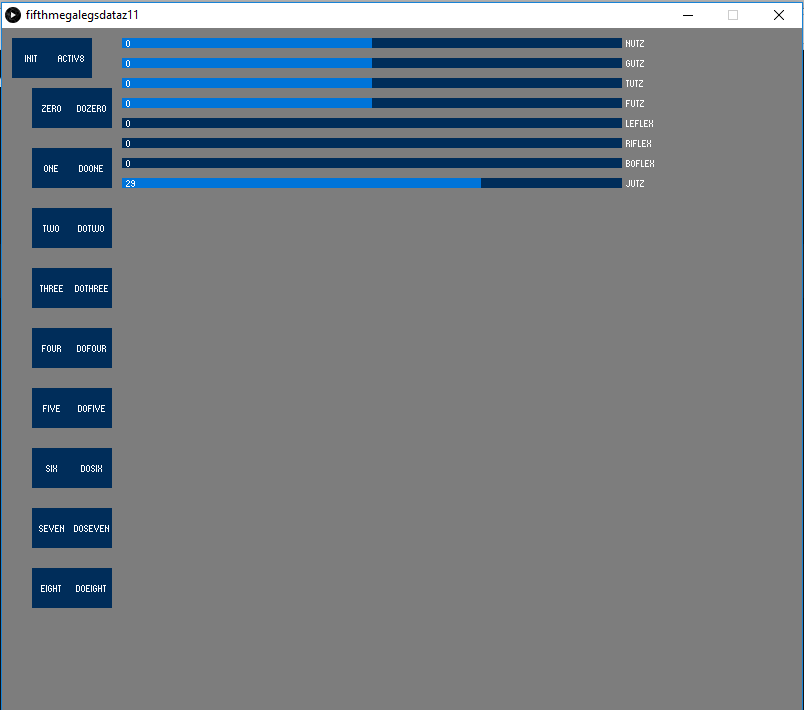 The squares give me the option to remember a movement by pressing teh number and then replay that movement by pressing the button next to it.
The squares give me the option to remember a movement by pressing teh number and then replay that movement by pressing the button next to it. The slider labelled 'jutz' at the bottom controls how many steps there are between each movement. So if I select 10, the code will work out the difference between teh current movement and the next one and then divide it into ten steps, which plays back quite fast. If I select a higher number the movement plays back much slower because there are more steps between each movement.
Eventually I will program some buttons which can apply acceleration 'curves' to each movement so that I can make it speed up and slow down between two movements. This should help reduce the jerkiness of the movements and make them more lifelike. One of the issues of having a constant rate of movement is that sometimes the set point and current position oscillate around each other causing more jerkiness.
The above video also demonstrates the very first and miniscule movements conducted while balancing on one leg. They are tiny, but showing that this is possible is extremely important if they are ever going to walk! It also demonstrates the power of the joints. Without a counter balance in the form of arms, the legs in the tappy motion are using a huge amount of force to keep the waist level.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.