 Dan DWRobotics
Dan DWRoboticsSo, no updates for a while. For a very good reason.
I have been fighting with the design process. Really slogging away, forcing myself to endure days of staring at a screen making measurements and generally trying to animate the mechanics in my head. I had to create a whole new method of driving the joints, using cables instead of large cogs. This gives me the ability to make high ratio differences whilst maintaining the ability to make the parts printable. ( There is a minimum practical size to 3D printed gear teeth.)
This is specifically required for the upper arm Yaw mechanism which needs to be small form factor but high power and relatively low speed. I have gone through about 50 iterations of this mechanism, each time having to wait hours whilst my parts print.
Each time I change the design I also need to redesign how I am going to get position feedback, which is actually quite difficult to design in pre-emptively.
The first three large iterations of this joint required angles of the motors that made the upper arm far too large and heavy when using printed cogs, which is why I begrudgingly turn to cables.
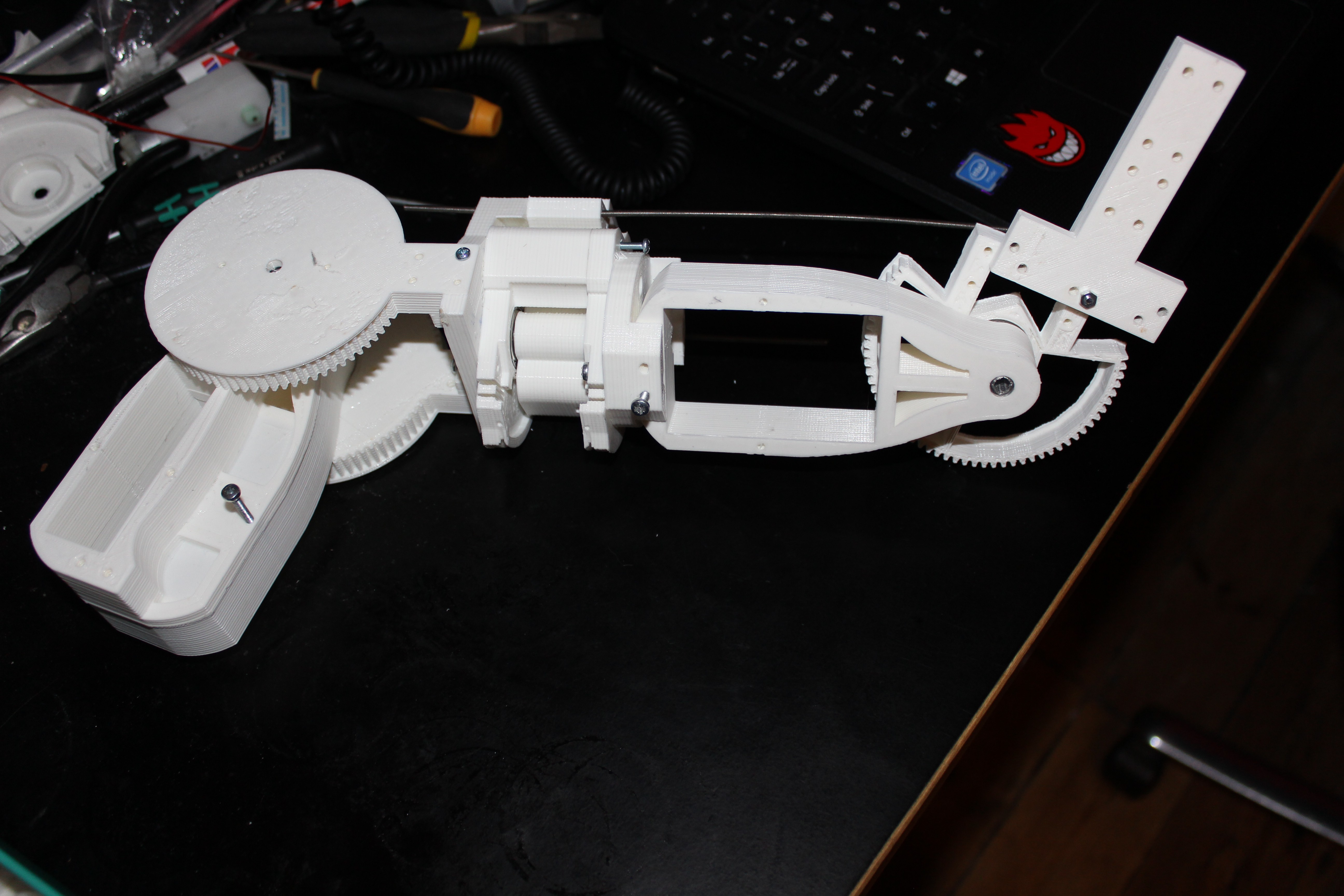
I'm going to post here the final result. The skeleton. No drive motors as yet, or cables, but all the mechanisms are proven after painstaking testing. The test yaw I have here is surprisingly strong and uses heavy duty fishing line to transmit movement. The best part is that it almost looks like it could sit inside a persons arm. It also moves within a very similar set of angles, stopping very close to where our own arm yaw would stop in each direction. I can't wait to get the motors hooked up!!!
I am going to now post a picture of what the first iteration of the upper arm yaw looked like next to the current version. You can't really see it from the angle but the first iteration at the bottom of the picture is 12cm wide and weighs a whole lot more than the current version.

I guess a final note, I should point out that each one of these joints is designed to hold a significant amount of weight. No-where near as strong as a person, or robot arm driven by dynamixels. But for the cost of each joint, these arms should hold an impressive amount of weight. Hopefully allowing them to interact with the world, carrying bottles, bags etc. If I get the fingers right ( I am thinking of having two sturdy fingers and a thumb) then I can easily see it holding an object of around 2 kilograms. The benefit of having a whole body is that many more motors can be brought into lifting movements, if enough control can be programmed in. I'm still struggling with IK of the legs, so I can certainly see these kinds of complex movements being an issue for me to program.
Why design the arms before the abdomen? Because it is crucial to know how they will work before I design the bit that they sit in. My designs evolve rather than me sitting there and having exact measurements and angles drawn down. I have a rough idea, but nothing exact until I have been through a few iterations.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
Yes I really want to design some planetary gears. This would be my first choice for this kind of movement. The only problem is, the maths. Standard cogs are quite easy to design. As long as the teeth mesh, they should do something. However, planetary gears need much more thought and calculation. The teeth need to mesh in multiple directions and the ratios need to be right or it won't spin true. I have been thinking about reading up on the theory of these gears, but i was already needing to start working with some cables to do the fingers, so I thought i would jump in and try the upper arm as well. It's likely, that over time I will inevitably change that mechanism to planetary. Although, if the cables work out, is there really a need to change it? I was surprised by how little lash there is.
Thanks for looking by the way. I appreciate any feedback and advice!!
Are you sure? yes | no
I wonder, have you considered using planetary gearboxes? I know that they are popular in robotics because of the small dimensions and high ratios. A worm drive comes to mind too.
Not that there is anything wrong with cables, of course, in fact our own bodies use tendons for everything. A great way to move all the weight where it won't be in the way.
Are you sure? yes | no
Well, I bit the bullet and designed a high ratio planetary gear and I am simply blown away. I've been fascinated by these gears since I opened up an electric screwdriver years ago. I now have quite a nice yaw mechanism for the lower arm ( wrist swivel) and it is much more compact than anything I would have designed before. It took a long time to get the teeth right but I'm now wondering if i should redesign the whole thing using these!! I just didn't think they would print on my crappy velleman printer but it works great.
Thanks for suggesting it. I probably wouldn't have bothered looking into this if you hadn't put it in my mind.
Are you sure? yes | no
I'm glad that I could act as an inspiration, can't wait to see how it comes out!
Are you sure? yes | no