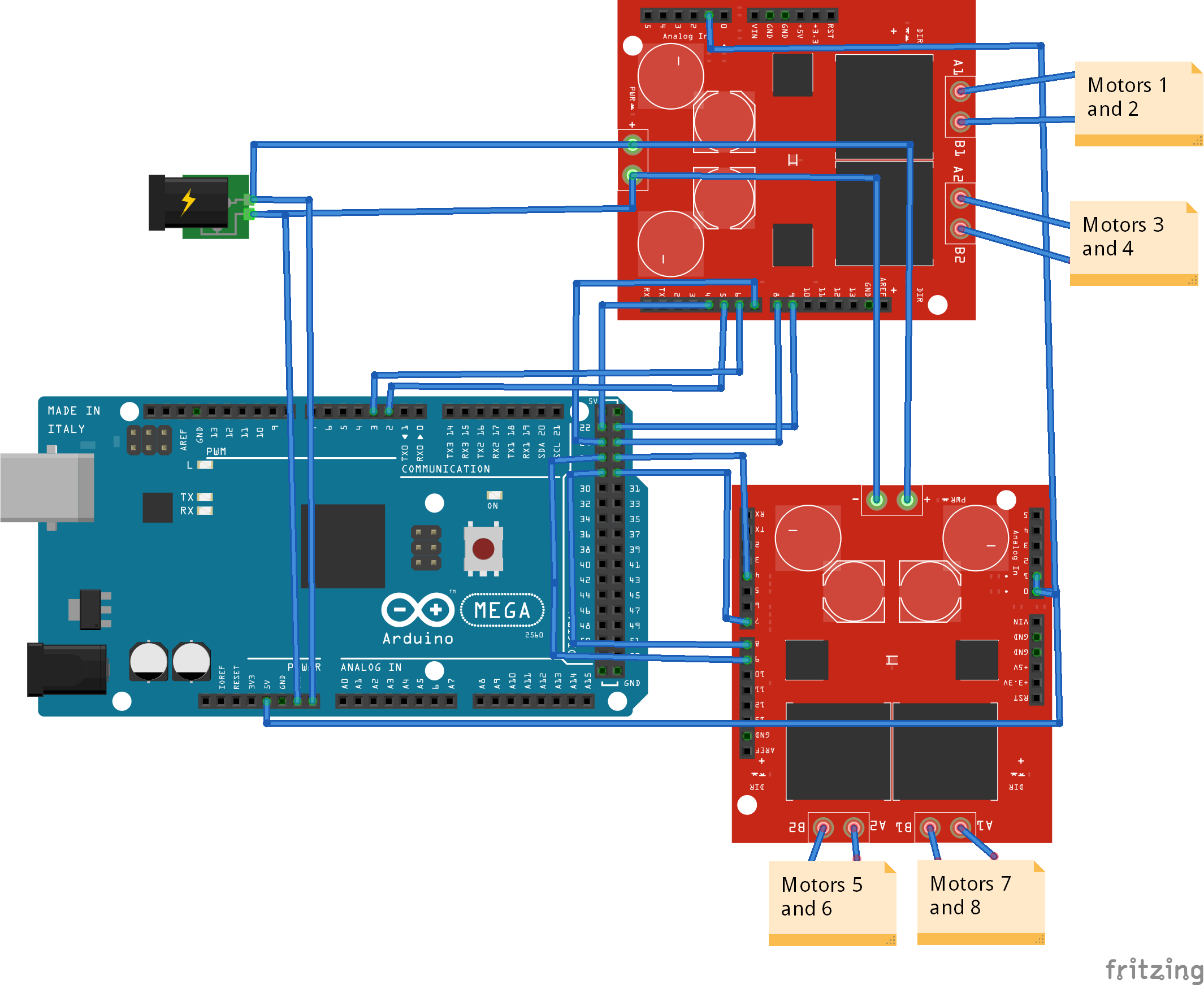
The electronics that go in the acrylic tube that goes underwater are called bottomside electronics. Their function is to control the motors, any sensors, and any attachments. The bottomside electronics need to be able to control the motor's direction and speed. To accomplish this difficult task we used two monster moto boards that control the 8 motors in pairs. They receive a PWM input from an Arduino Mega and 12 volts from the tether. The robot also uses a teensy for communication. The underwater electronics are also capable of controlling the servo motor and the stepper motor that turns the servo motor.

Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.