 Charles Galambos
Charles GalambosThough the motor controller isn’t ready, I tested a leg by fixing the drive spline and putting vertical force on the leg.
The motors tended to twist, so the hips needed extra reinforcement. The reinforcements were extended to add a front bumper. There is still a little bit more twisting than I would like, making the legs springy at small angles, how much this will affects the legs in walking isn’t clear.
Some of the clamp joins also gave, hopefully a combination of tightening and some hot glue to increase friction will sort this out.
With motors on the hips dropped lower, another worry is the clearance between the motor mounts on the legs.
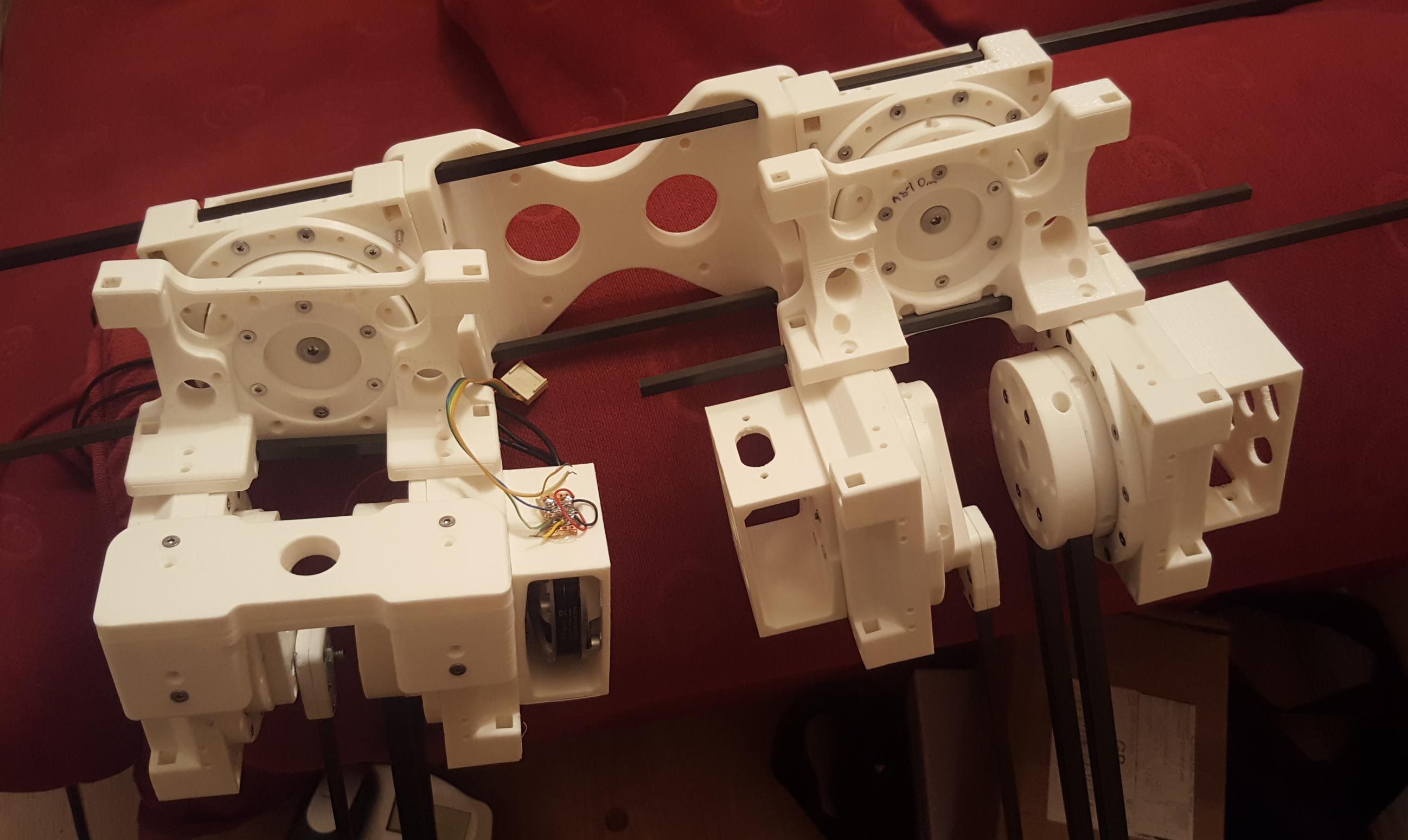
One of the design changes that came from this was to round off the corners on the motor mounts as it improves the range of movement noticeably.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.