 Sergei V. Bogdanov
Sergei V. BogdanovWe designed and constructed middle-size bipedal 2- motor walking robot.
1. A method for calculating the dynamics of the mechanisms of bipedal movement with arbitrary 4-linkages mechanisms has been developed.
2. The method allows to calculate all the necessary movement parameters for the construction. To verify the calculations, the models of the Hoeken mechanism and the 4- linkages mechanism designed to draw trajectories on millimeter paper were designed and made.
3. The mechanism of Hoeken and the Chebyshev are considered.
4. A modification of the movement mechanisms is proposed, which allows to significantly increase the efficiency of bipedal movement, and also significantly reduce the loads on the elements of the mechanism and the required power of the drive motor.
5. It is shown that the proposed modification allows to reduce the impact speed practically to zero with the change of the supporting leg, which is extremely important for complex and easily destructible soils (especially disturbance of the tundra ecosystem).
6. A functional, block diagram and a basic diagram of the robot platform have been developed. Based on the theoretical study of the model, a control algorithm is created, and based on the algorithm, the code is written in the Arduino ide.
7. The model of the bipedal platform is assembled, the test is conducted, the algorithms for controlling the power elements of the platform are tested.
8. On the basis of mathematical and model modeling a prototype is constructed with the following parameters:
-effectiveness of movement - lifting of the center of gravity does not exceed 0.5% of the traveled path
The maximum torque required for motion is less than 0.01 of the product of weight by the step length
-relative speed of supports during the change of legs is reduced to zero.
0%
0%
2- Motors Bipedal Robot using Hoekens Linkages
2- Motors Hoekens Linkage Bipedal Robot
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests




 Miguel Wisintainer
Miguel Wisintainer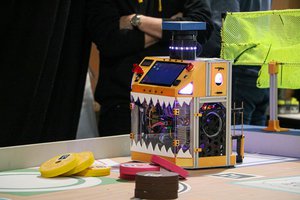
 Gaultier Lecaillon
Gaultier Lecaillon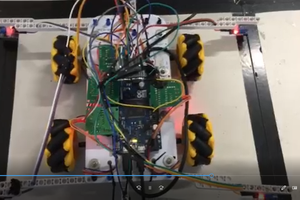

 Ahmed Azouz
Ahmed Azouz
Thanks for the video, it would however be much more convenient if you uploaded it to some service that allows streaming, such as YouTube or Vimeo, so that we don't have to download the whole thing to see it.