 BTom
BTomIn the previous version we used Arduinos to control the servos.
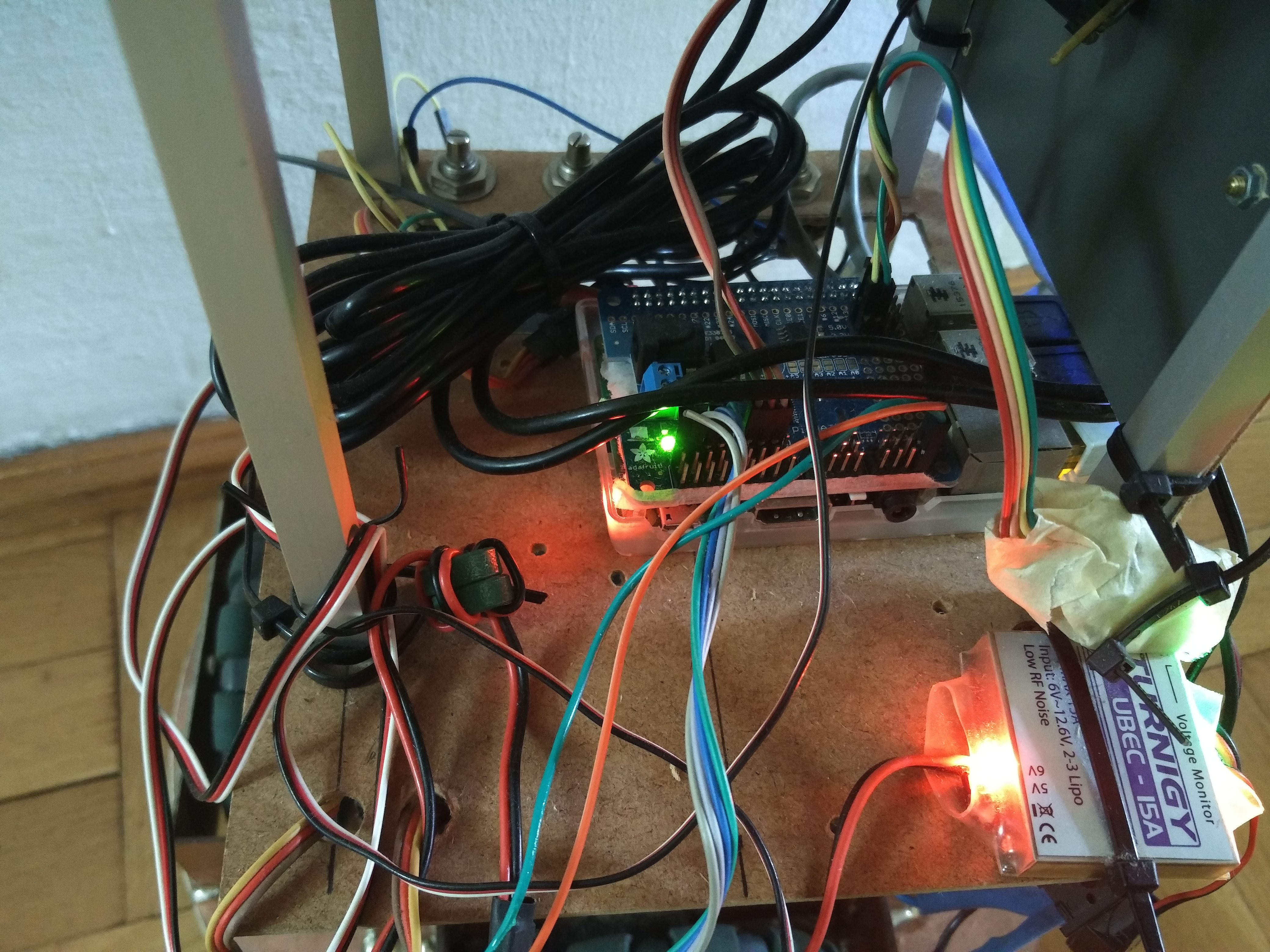
The current version has a "Adafruit 16-Channel PWM / Servo " shield for the raspberry.
It's easier to program. We can use python scripts on the robot directly to control the servos. We will use this for the autonomous functions on the robot. It's reduced the development time, because we don't have to reprogram the Arduinos every time when we change something in the motor controller raspberry program.
The shield can be powered from the UBEC, and this way we can switch of the motors, but not the whole robot.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.