 Joe
JoeSo now that I had a solid picking concept prototyped and working, the next challenge was finding suitable actuators for the job. My desire was to have each string independently actuated to allow any number of strings to be strummed at any time. This means an actuator for each string, and there were a lot of constraints that came along with that.
The ideal actuator (aim for ideal, settle for reasonable, right?):
- Fast enough to repeatedly strum the string quickly (appx 10x/sec)
- Powerful enough to overcome the force required to strum the string
- Quiet enough to not be obtrusive to the music
- Small and lightweight as possible
First, we need to figure out what kind of forces I need to generate. Since I was dealing with a pick with rotational motion, it makes sense to spec that out in units of torque. I wish I had taken a picture for this to show you, but I didn't. What I did was place the Pick Bridge in place on the guitar, which was laying down flat on a table. I connected a string to my pick, and routed the string over the edge of the table via a small pulley wheel. I then hung weights to the string until the pick was able to pick the string.
The result was 62g, and the attachment to the pick arm was about 10mm from the axis of rotation. This means I needed ~600mN * 10mm = 6 mNm of torque (or the linear equivalent).
There were basically two options: rotary, or linear actuators. Rotary solutions were either too noisy or large, and the linear options were either too slow, too large, or had too short of a throw. I considered pneumatics, but that concept carried a requirement for a compressor....no go.
I considered bringing the actuators off of the guitar, but that meant having some sort of linkage or cable system going to the guitar, which would be likely unwieldy and require oversized actuators to overcome the additional friction forces. Call me an idealist.
So I did what any typical hacker would do, and figured I'd try my hand at designing my own linear actuator- how hard can a few magnets and coils really be?
Rotary actuators were scary to me at the time, so the concept is a permanent magnet linear solenoid. It had to be bi-directional, and there's only two ways to get bi-direction motion out of a linear solenoid actuator:
- With a spring, like the setup of a typical solenoid actuator, where the electromagnet provides the push, and the spring does the pull (or visa versa), or
- With two coils, one for push, one for pull
Since I planned to strum the string with EACH motion (forward and backward), a spring'd solution would require constant power to hold the plunger in one of the positions if the pick wasn't moving. Battery life and heat considerations quickly directed me at the dual-coil configuration.
The cut-section render below shows the first concept design. It looks like there's just a single coil, but it's two, side by side.
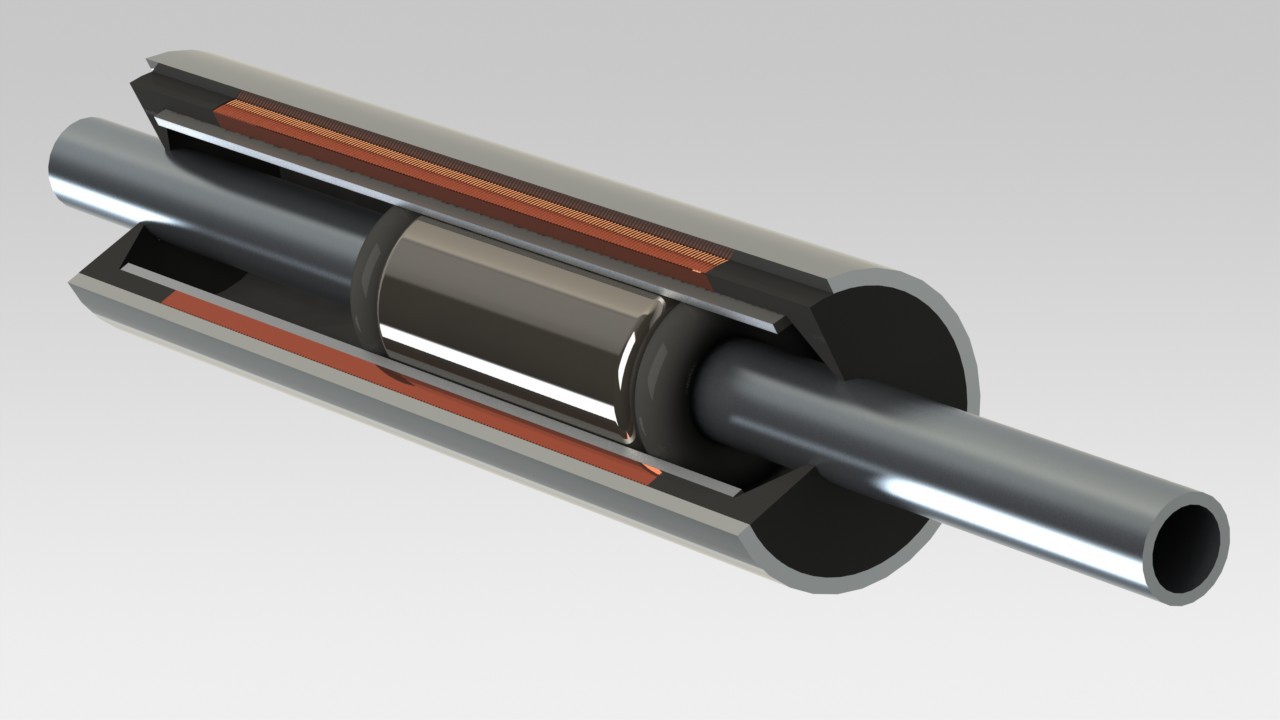
One of my ideal design constraints was that the center to center spacing between them be the same or close enough to the spacing of the strings so that I could position each actuator in line with its corresponding pick. Measurements and research into guitar string spacing led me to an ideal spacing (/actuator diameter) of 10mm.
I had my design criteria...time to design!
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.