 OpenRomibo
OpenRomiboA while ago I discovered that the founders of a social robot company we're going to be shutting down but they wanted the project to live on and I thought it was an awesome opportunity to take it on. Now I'm heading up the effort to make Romibo an open source project and keep it alive and improving. I had already been on the search to find just the right robot for my own research so this seemed to be a great fit. I've come across some pretty amazing robot kits that were mostly arms, bipedal or line followers with little focus on HRI. Other platforms that covered HRI research I found to be far beyond my personal budget. Luckily, I was given access to all documentation and repositories which you can find here. Now anyone can contribute, build, modify, remix to this awesome project.
Let's build more Romibos!
OpenRomibo is a robot platform made by and for community. Like rasing any robot, It takes a village. Below is a list of next steps, Solving these technical puzzles would be great. For to live, Romibo needs your expertise!
Here's what's next to get the magic rolling:
Software:
Figure out how to make mosquitto run on startup(!!!)
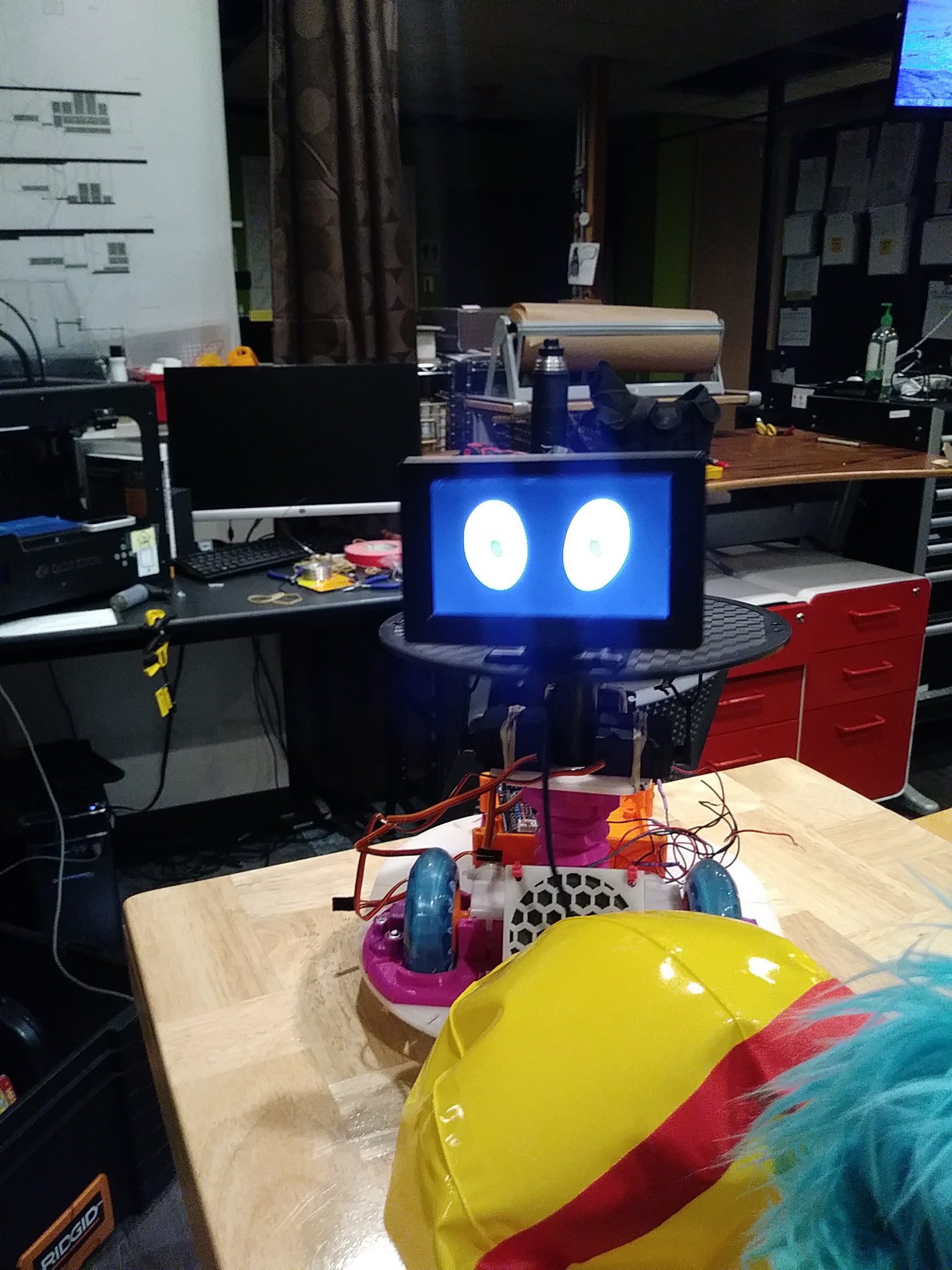
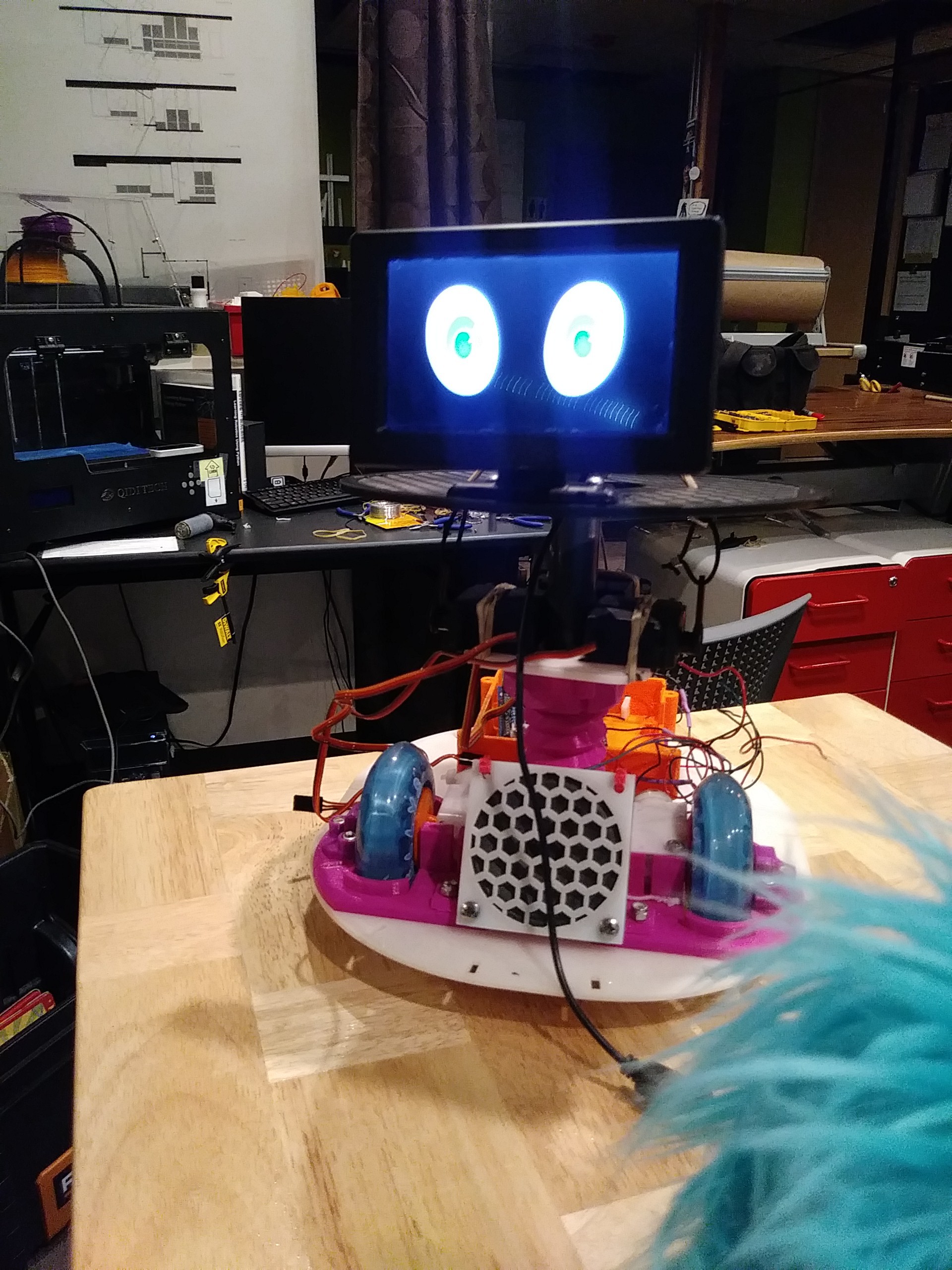
Figure out how to put splash screen on boot, so that Romibo's eyes doesn't look like eerie lines of codes
Figure out how to shorten loading time of eye animation pictures
Figure out how to add more emotions: Seems like not enough memory
Romibo_twitterpatted's current sequence of pictures needs work
Figure out how to have a better voice for Romibo
Figure out how to eliminate cut-off of first few words of audio
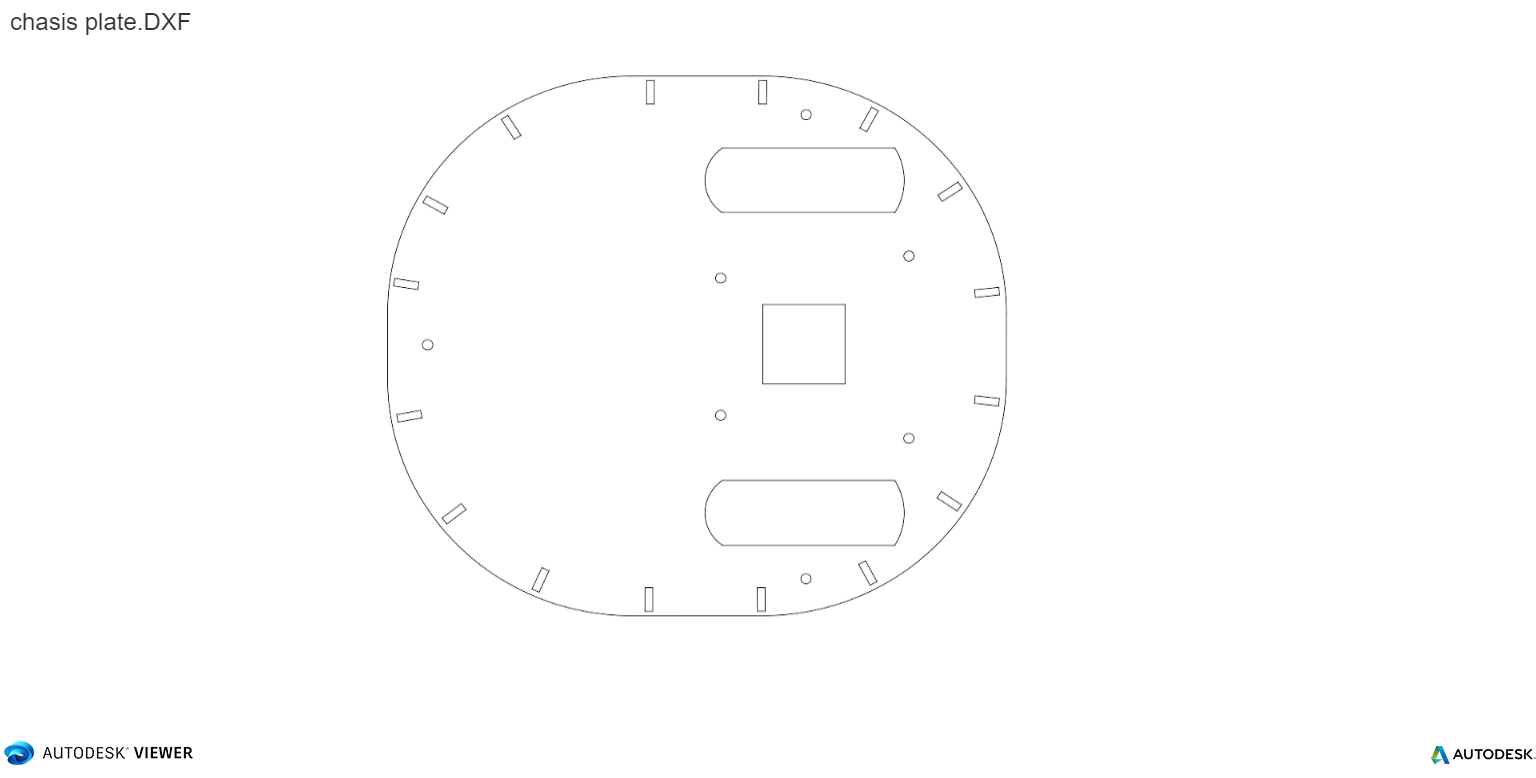
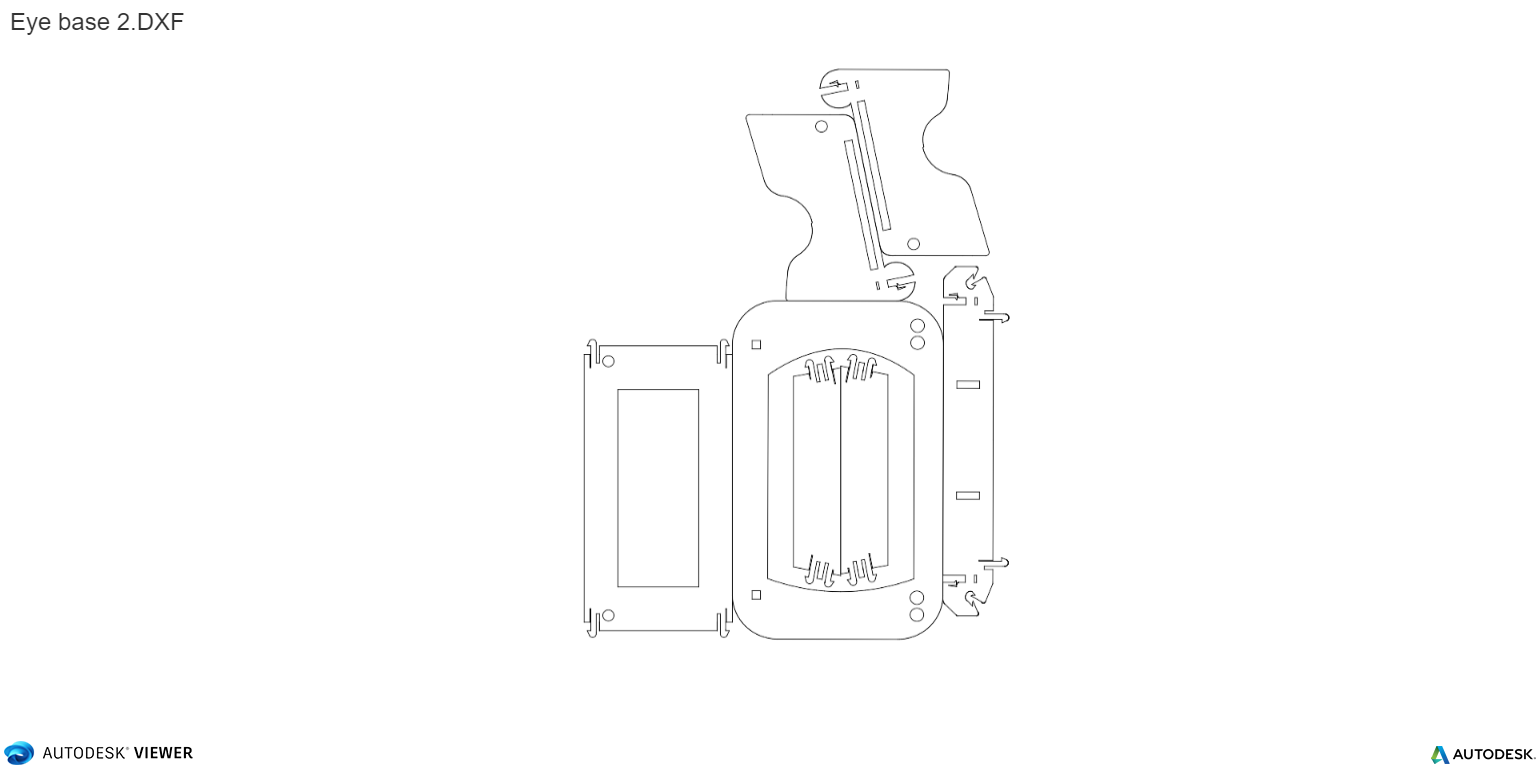
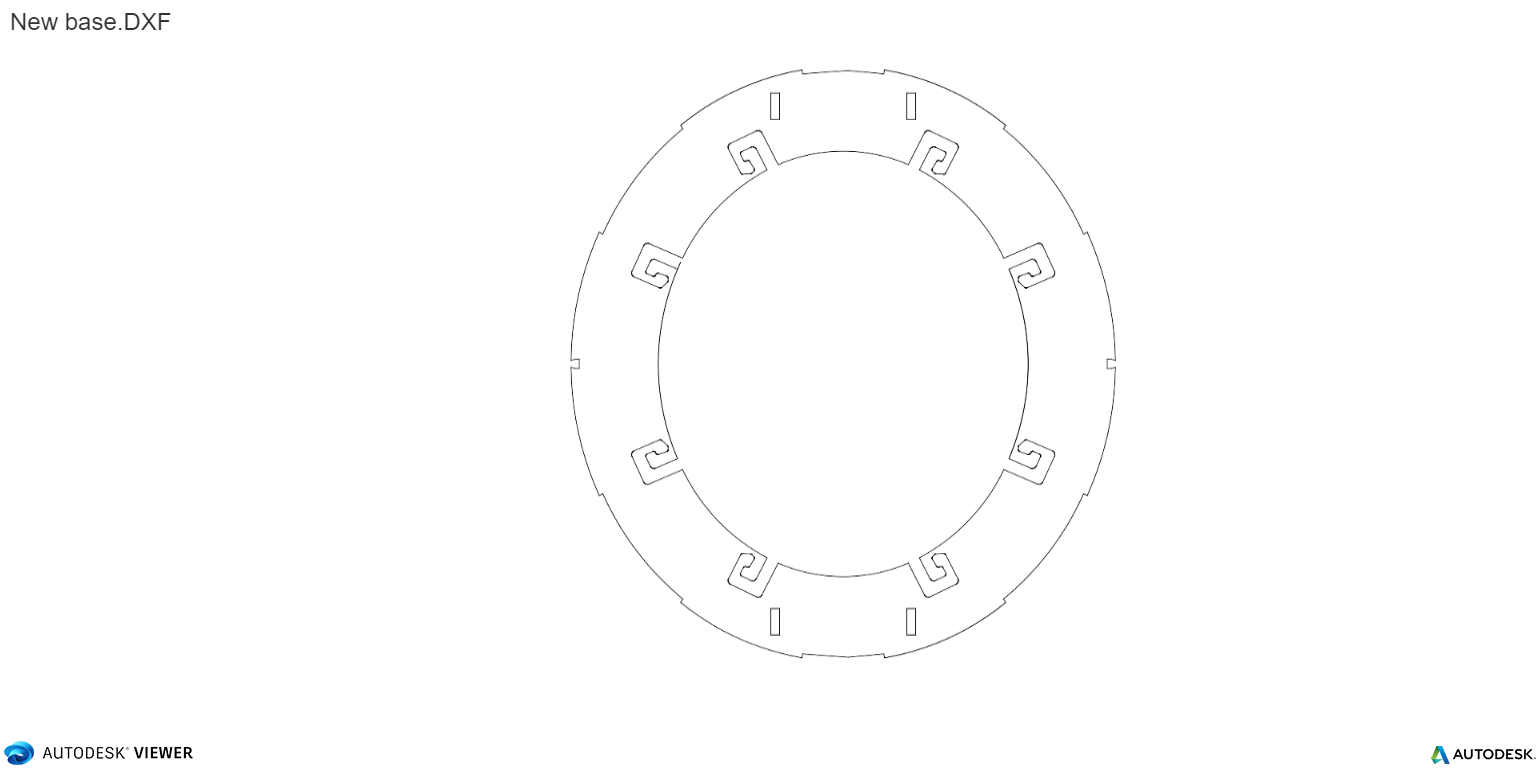
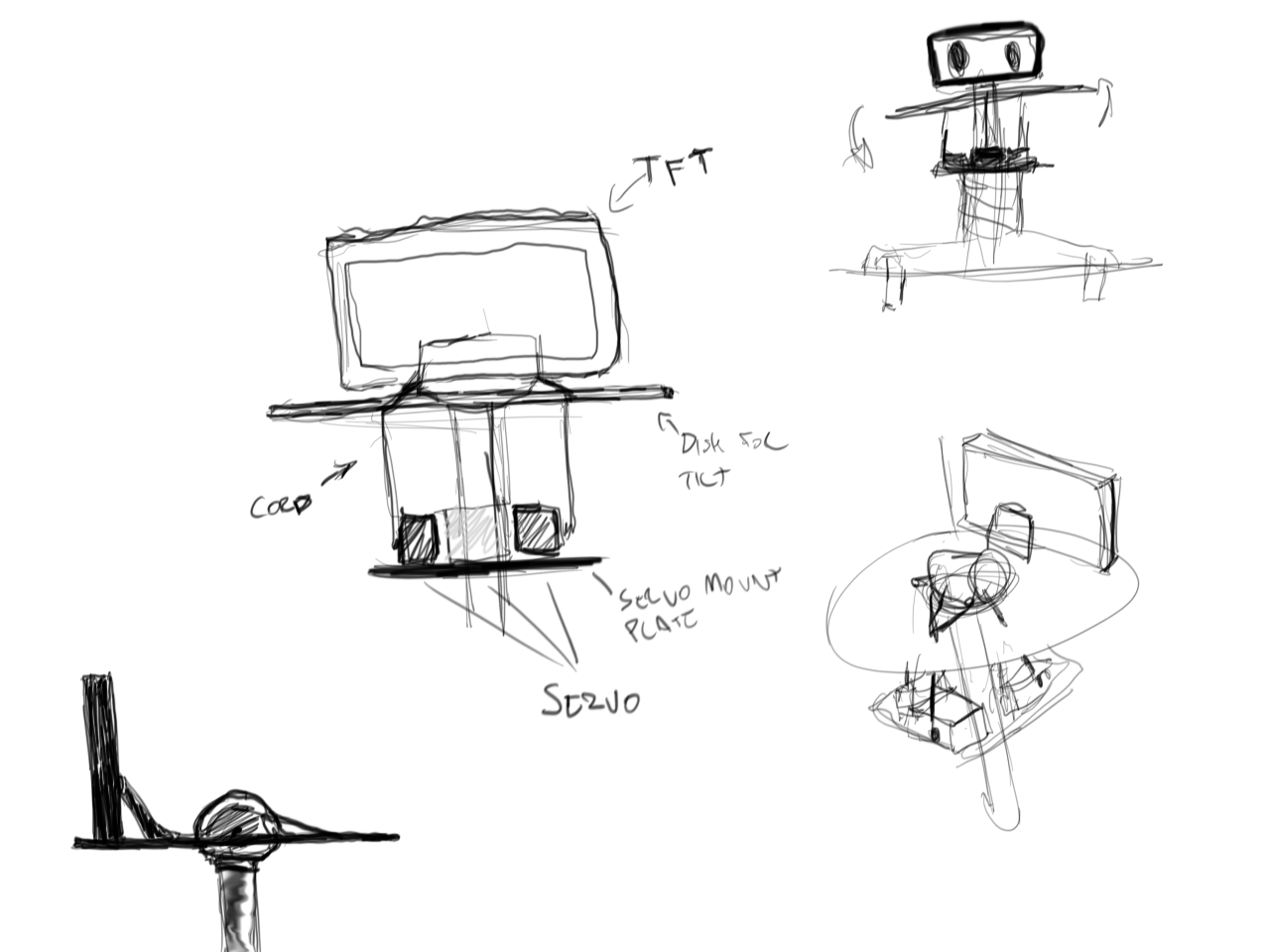
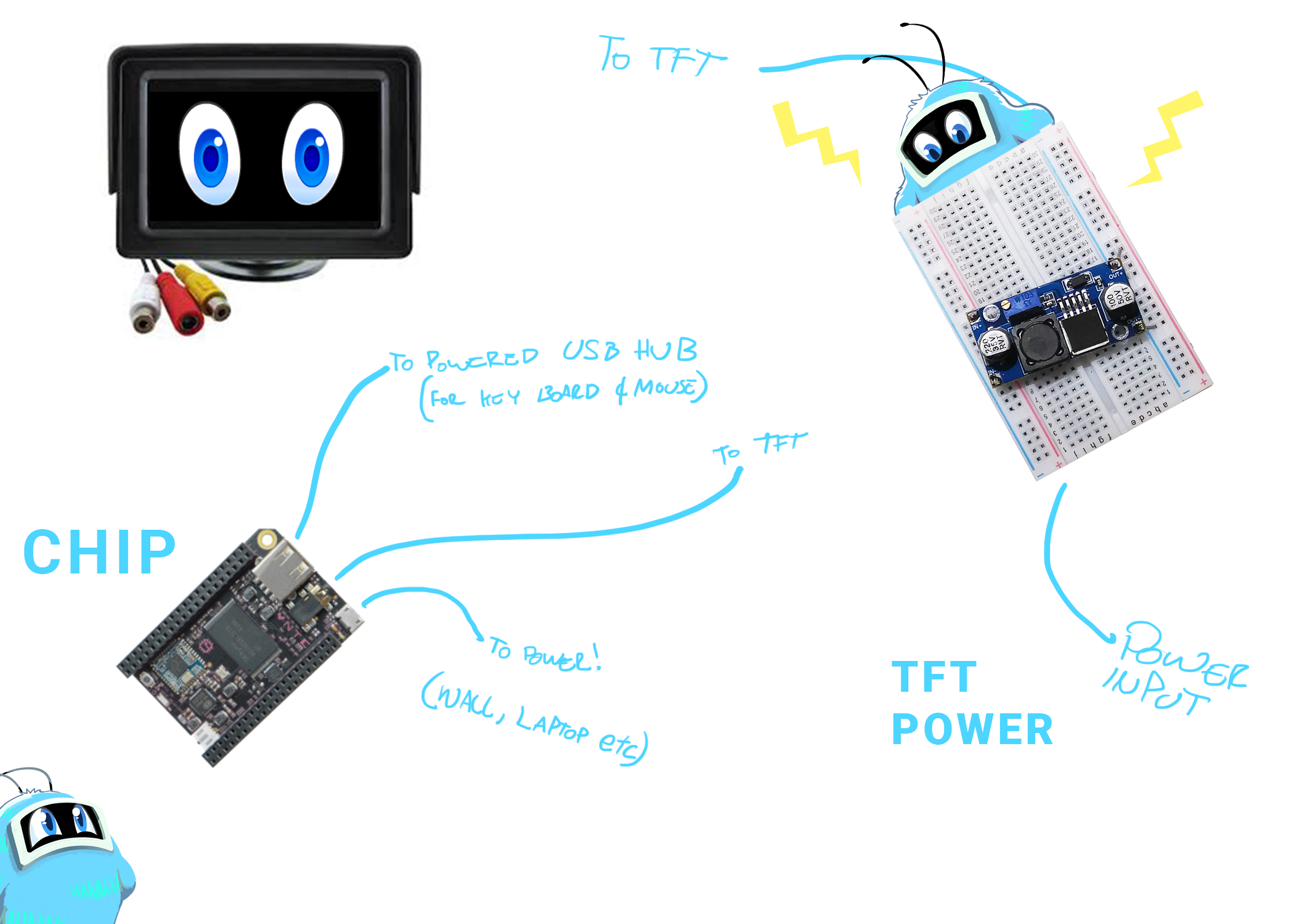
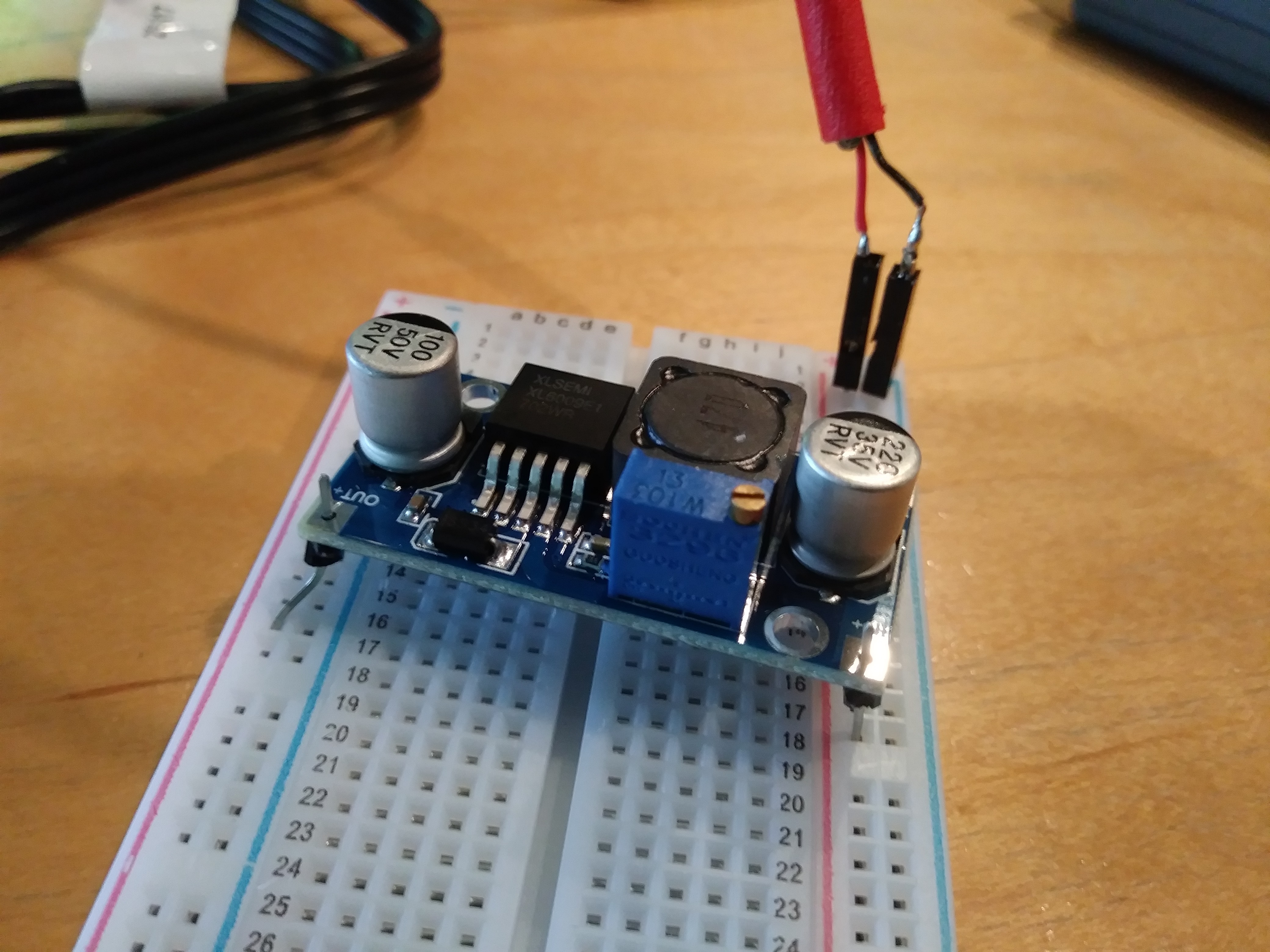
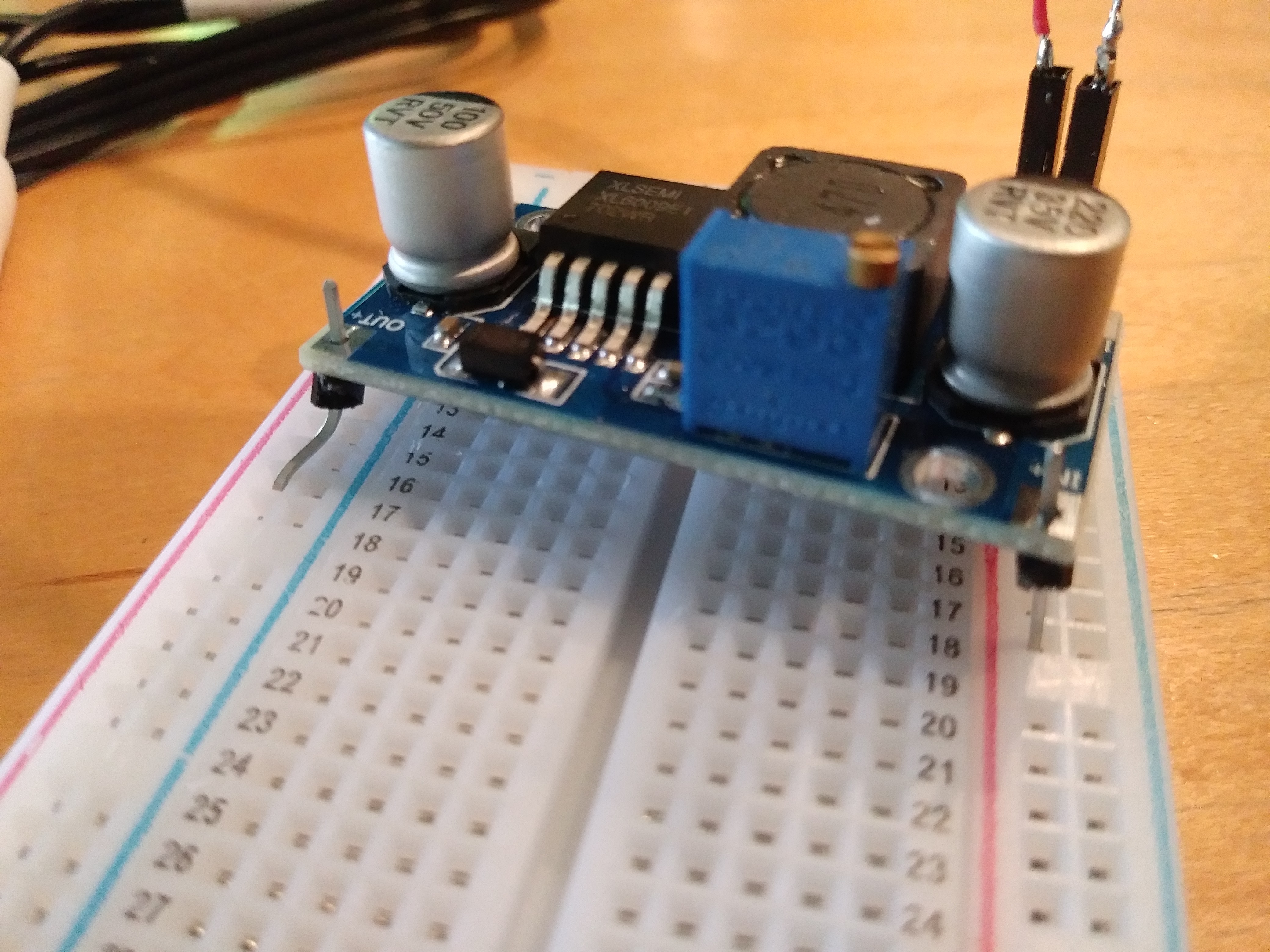
Hardware:
Figure out more reliable ways to connect wires
Figure out better ways of housing electronics
Figure out how to make motors more responsive
Figure out better ways of holding motor wheels in place
App:
Figure out how to replace Paho MQTT with cocoaMQTT, to eliminate apple store problems (!!)
Figure out how to preserve client existence when transiting between modals. The problem right now is that the connection resets each time a new button/palette is added.
Make the connect button fit the theme better.
Make a better 'instructions' page
Make an 'about' page.
More to come soon!
In the mean time, visit:
https://github.com/OrigamiRobotics/open
Enjoy.
#OpenRomibo













 Shifty
Shifty
 Irene Sanz
Irene Sanz
 Peter Buckley
Peter Buckley
 Dan Royer
Dan Royer
Wow this is a cool educational project, a robot designed specifically for students, I would gladly investigate it. You may also like my educational project https://papersbattle.com/best-essay-writing-service-reddit/ , where you will find the best essay writing service reddit, the target audience of this project is just students, so I think that you will be interested.