 Sepio
SepioYesterday Olaf Baeyens gave me some good advice about adding an emergency switch. "Something that may be important to your electronics. In my situation I originally cut the power at the mains voltage. However I pretty fast discovered that the main power supply holds a lot of more energy so the stepper motors did not immediately cut their movement. Especially when you develop your software this can destroy your parts or even worse lose a finger."
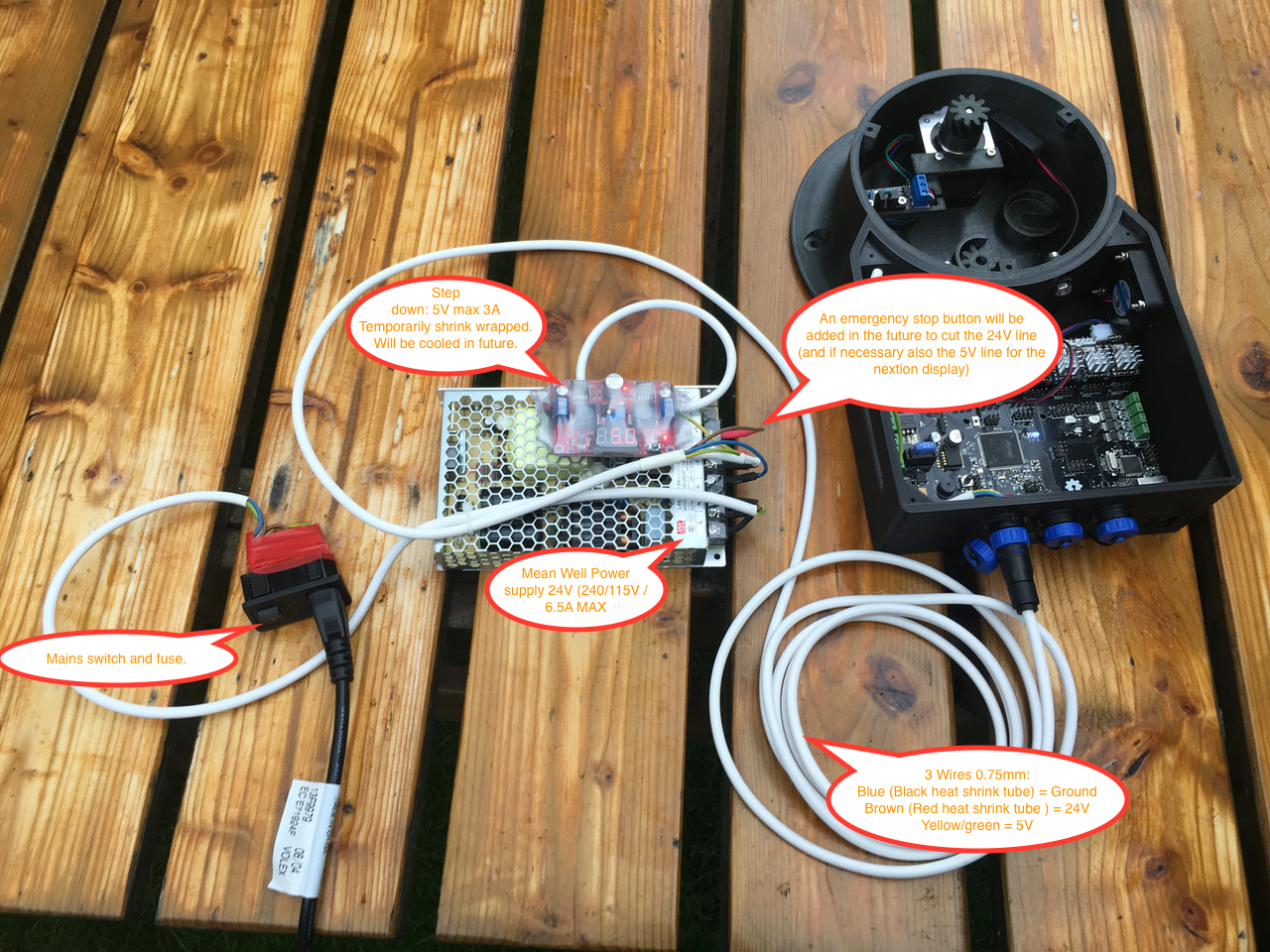
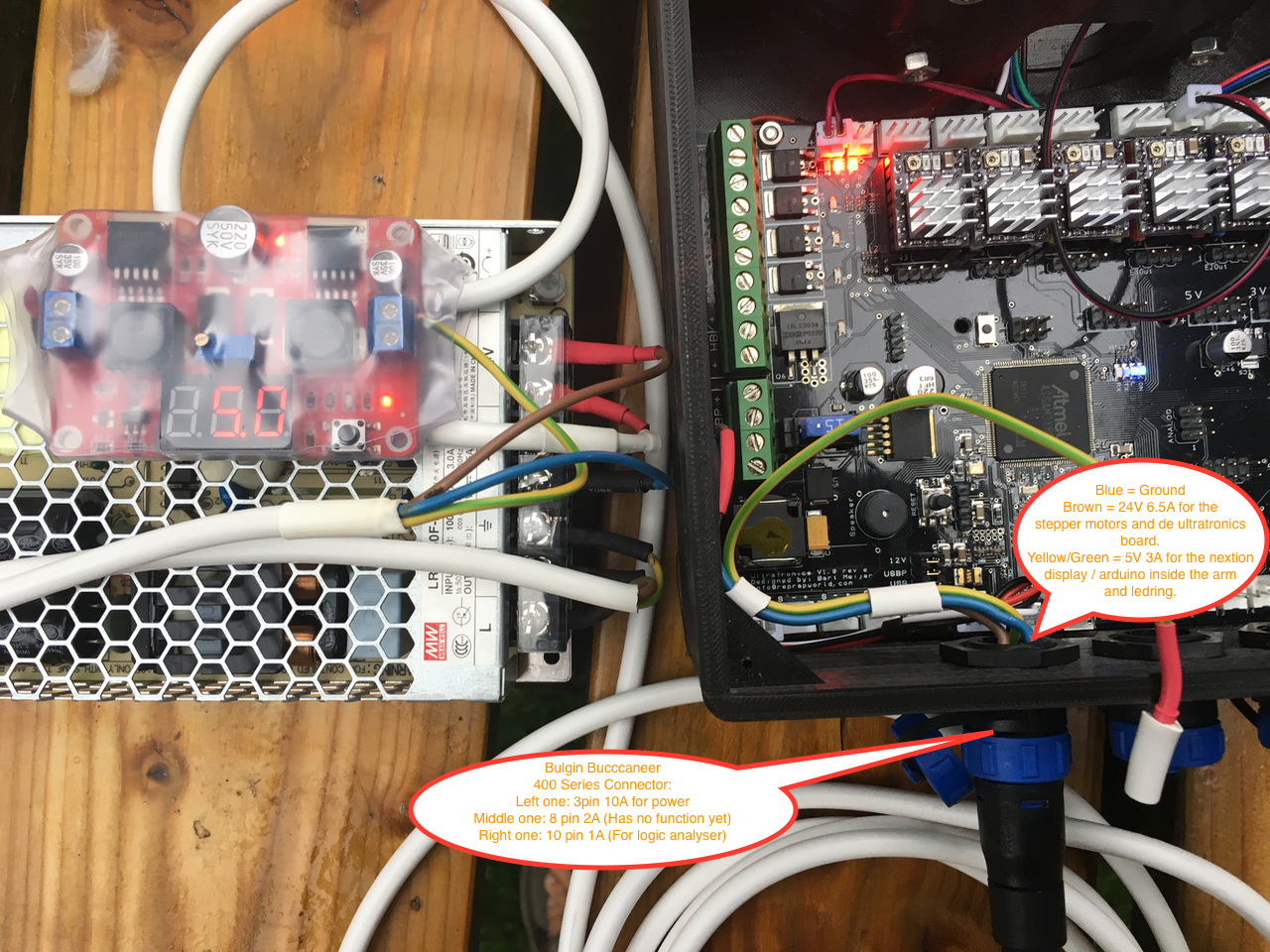
So I have ordered one today. Below two photo's of my setup. I'am going to created an case for the Power supply and Step down converter. This case will also contain the emergency button to cut the 24V line so that all the stepper motors will stop immediately.
This case will provide power though a thick 3 core wire to the base (Ground/24V/5V). If necessary I could also cut the 5V line for the Nextion Display but I don't expect that to be necessary.
The Ultratronics can be powered by the 24V input, or by both USB ports. Is it safe to connect the computer to one or both USB ports and use the 24V input at the same time? Or do I have to change one of the 3 power input jumpers? Momentarily I'am using an USB isolator to be safe.
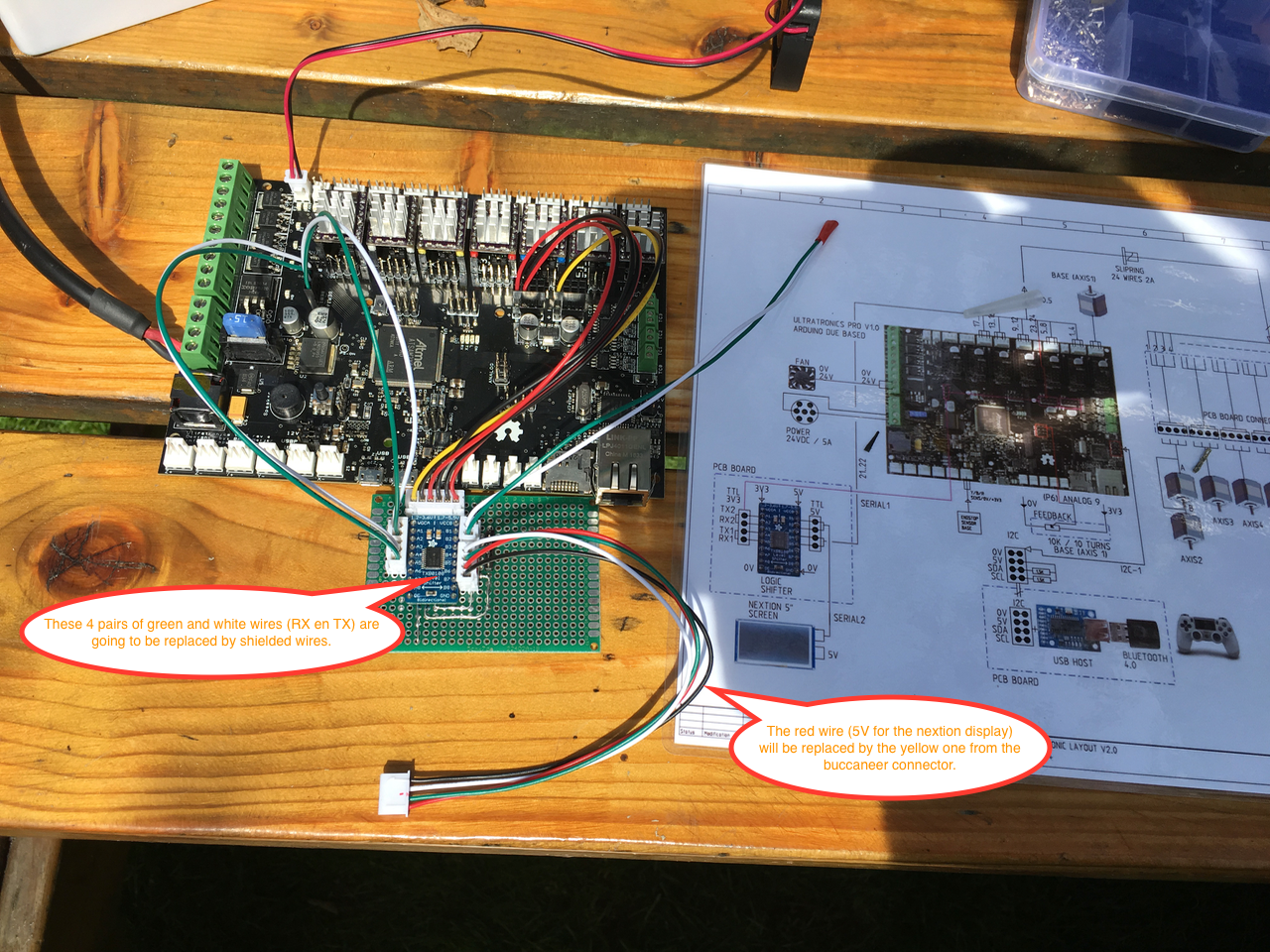
Danny gave some good advice about using shielded wires for the RX en TX to prevent electrical interference. "Your nextion serial connection between the serial port on the ultraboard needs to be shielded! That solved all my communication problem I had in the past."
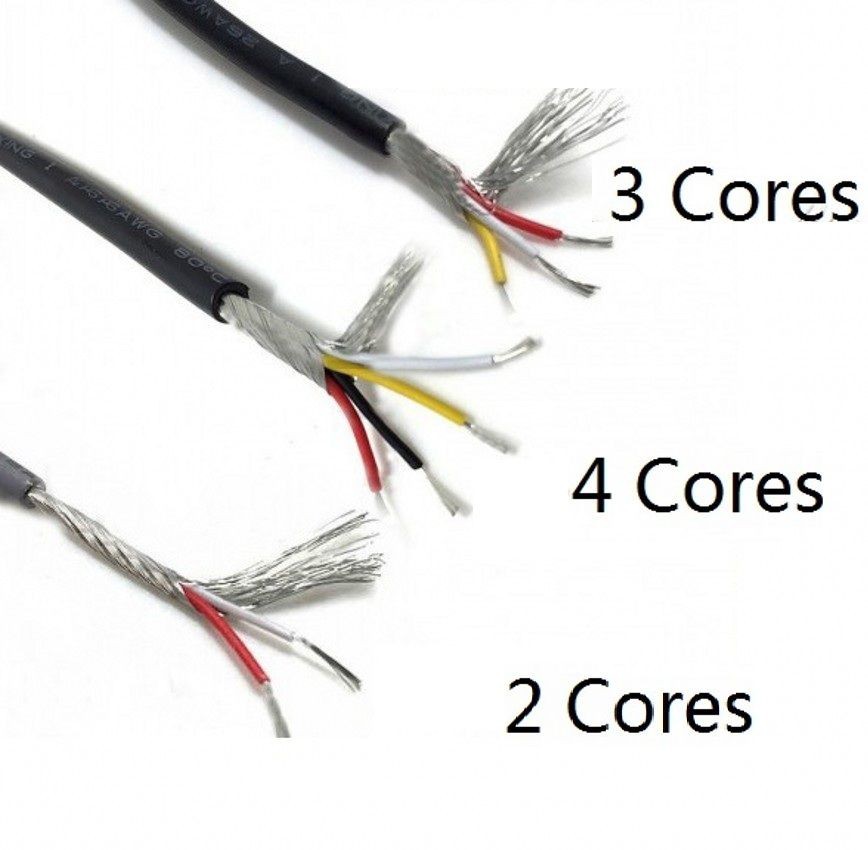
I have ordered 24 awg 2 and 3 core and 26 awg 4 core shielded (headphone) cables.
What is the best way to shield the cable? Some people say that you don't have to connect the shield. Some people use the shield as ground. And some people are connecting the shield on one side to ground.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
Wow! Making good progress in a few days!
Are you sure? yes | no
I love to see your progress.
I am going to try PETG to print the parts. ABS I have big issues with warping problems.
Are you sure? yes | no
I am using PLA for the parts that stay cool (mostly orange). And I use PETG for the parts with the motors (mostly black).
I used the CPE material settings in Cura. I have some trouble printing the standard Cura support structure. It sticks to the print head. I think I have to lower the temperature a little bit. I am using Real filament. Some tips about printing with PETG: https://www.xyzfabs.com/forums/topic/63/print-settings-for-petg-esun-solid-black-filament/
Today I created the support with Meshmixer. Now I’am printing the ART1BODY_P2 with this new type of support and it seems to work. I will post a photo tomorrow. It uses a lot less support. For example http://www.meshmixer.com/images/mainpage_download.png. After using meshmixer you will have a new .STL that can be printed without support. For more info: https://youtu.be/aFTyTV3wwsE
PETG will stick to the printhead and can be cleaned with a scotch brite sponge when the print head is hot.
PETG sticks very well to the glass print bed of my Ultimaker 2+. I clean the glass with an Alkoptip alcohol prep and then I use some 3DLAC spray. It sticks like PLA and has no warping and no (bad) smell.
After printing you have to wait for the printbed to cool down. Most of the time the printed object will lay loose on the glass. If that’s not the case then you can use some IPA spray. After spraying a little bit on the edges you will hear the the sound that it is coming loose.
If I switch back to PLA for the other parts I clean the printhead with an atomic pull to remove al residue.(https://ultimaker.com/en/resources/19510-how-to-apply-atomic-method).
Are you sure? yes | no
Thanks for the advice.
Are you sure? yes | no