 Sepio
SepioBelow all the parts of art 2.

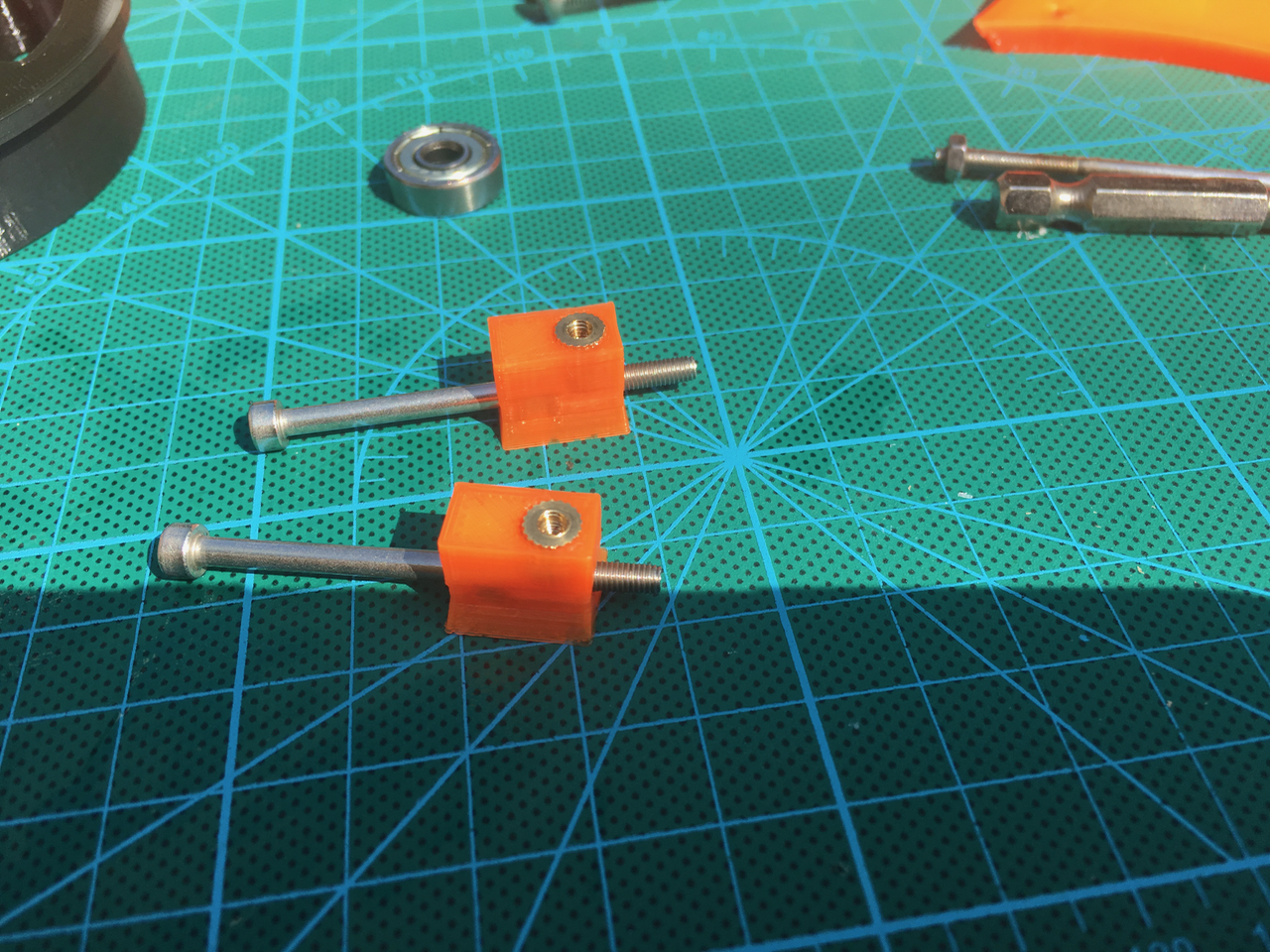
First I had to create the belt tensioner wheel mount. At first I had no clue how to fit those wheels. There is no room for a nut. So I decided to use m3 threaded inserts. I made the hole a little bit bigger. I fitted the insert on a long screw so I could heat up the insert. Then I inserted it into the hole. The plastic melted a little bit and after aligning everything I used some cold water to cool the plastic down.
The mounts with the threaded inserts.
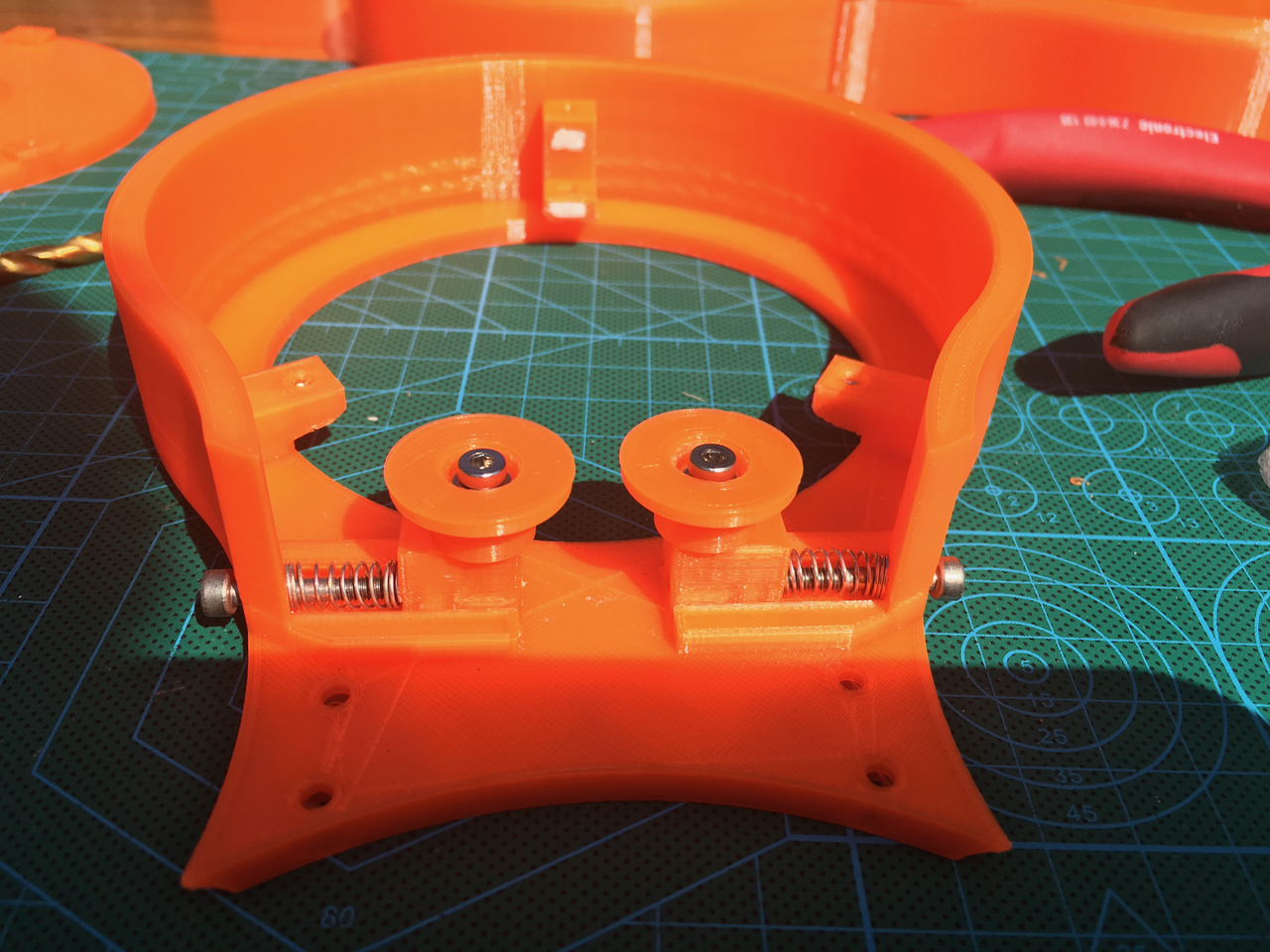
Now it was time to add the belt tension wheels. I also used two halfs of a compression spring (from a pen) to push both belt tensioners to the inside.
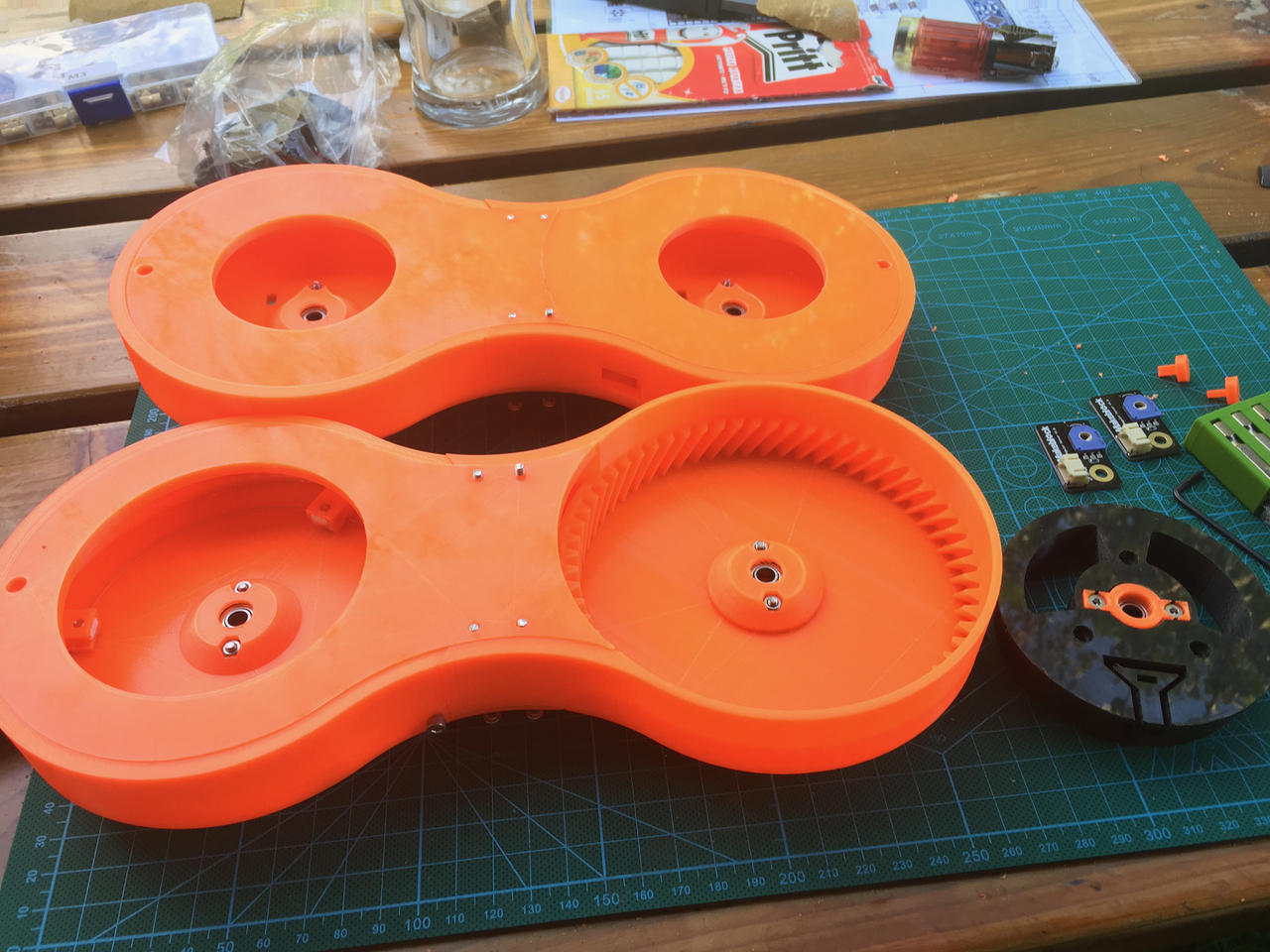
Now it was time to fit all the parts together. I don't like the orange parts for the sensors which have to be glued on the axles. I am going to make the axle a little bit longer and use that for turning the potentiometers.

The inside.
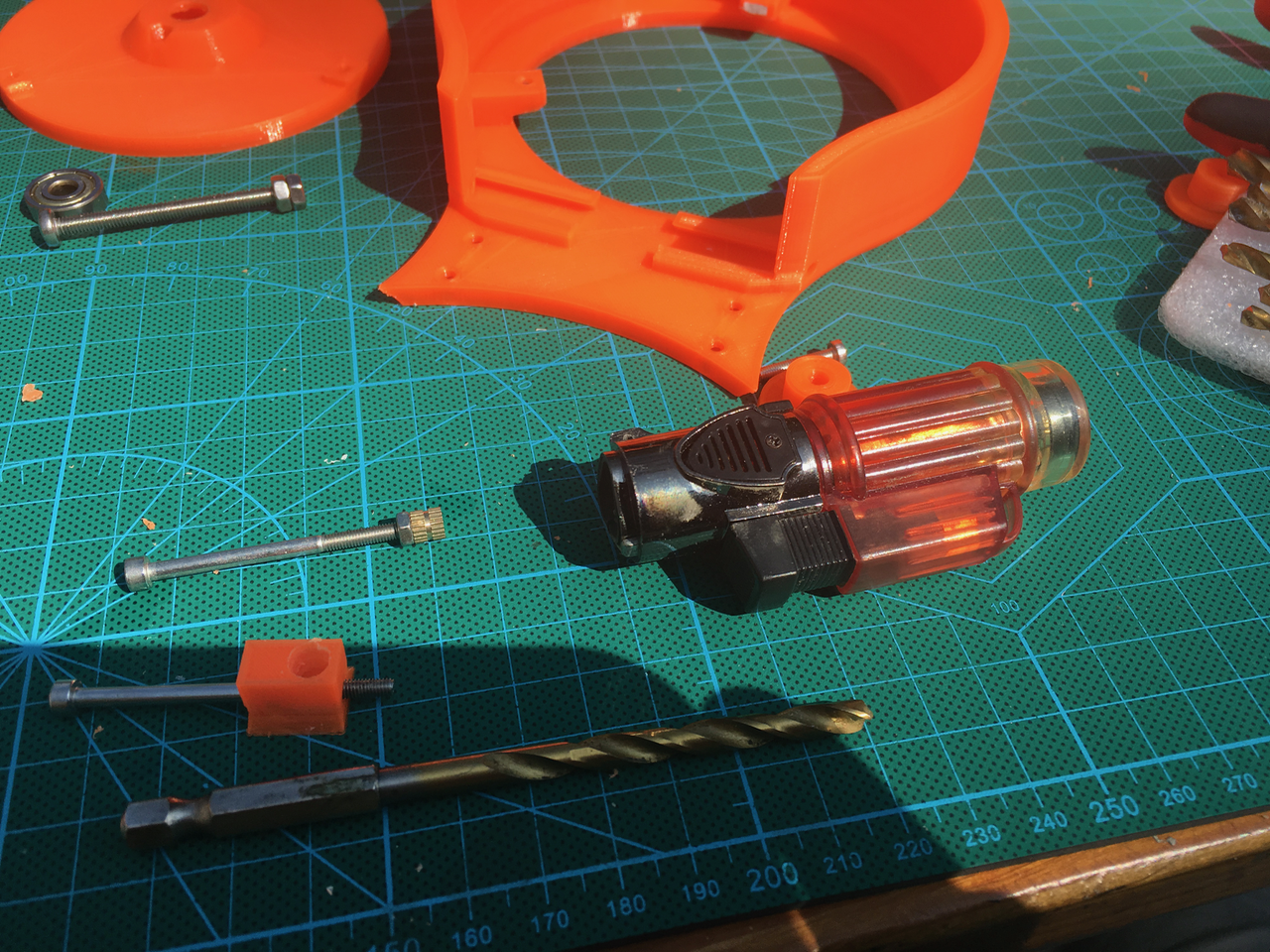
Now it was time to create the axles. I made one side of the 5mm axle a little bit smaller. Just put the axle in a electric screw driver. Use the dremel (or file) to grind the axle to 4mm. Then I used the dremel to flatten one side.

I fitted the orange parts on art 1 and inserted the axle. The side with the flat area is on the inside.
I used some tape on the Axle to mark the length.
Then I cut the Axle with the Dremel. Use the screwdriver to turn the Axle and keep the running Dremel steady.

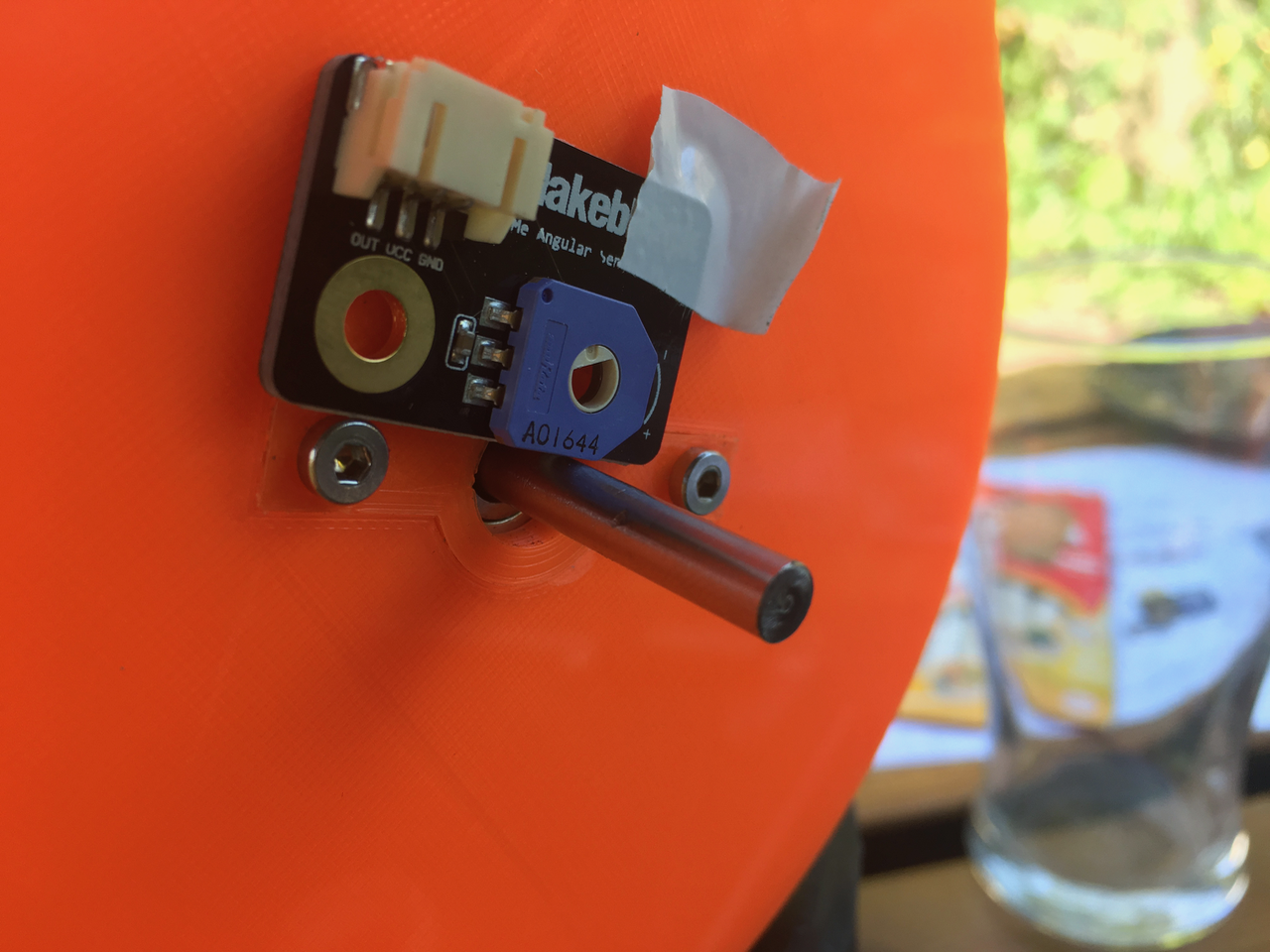
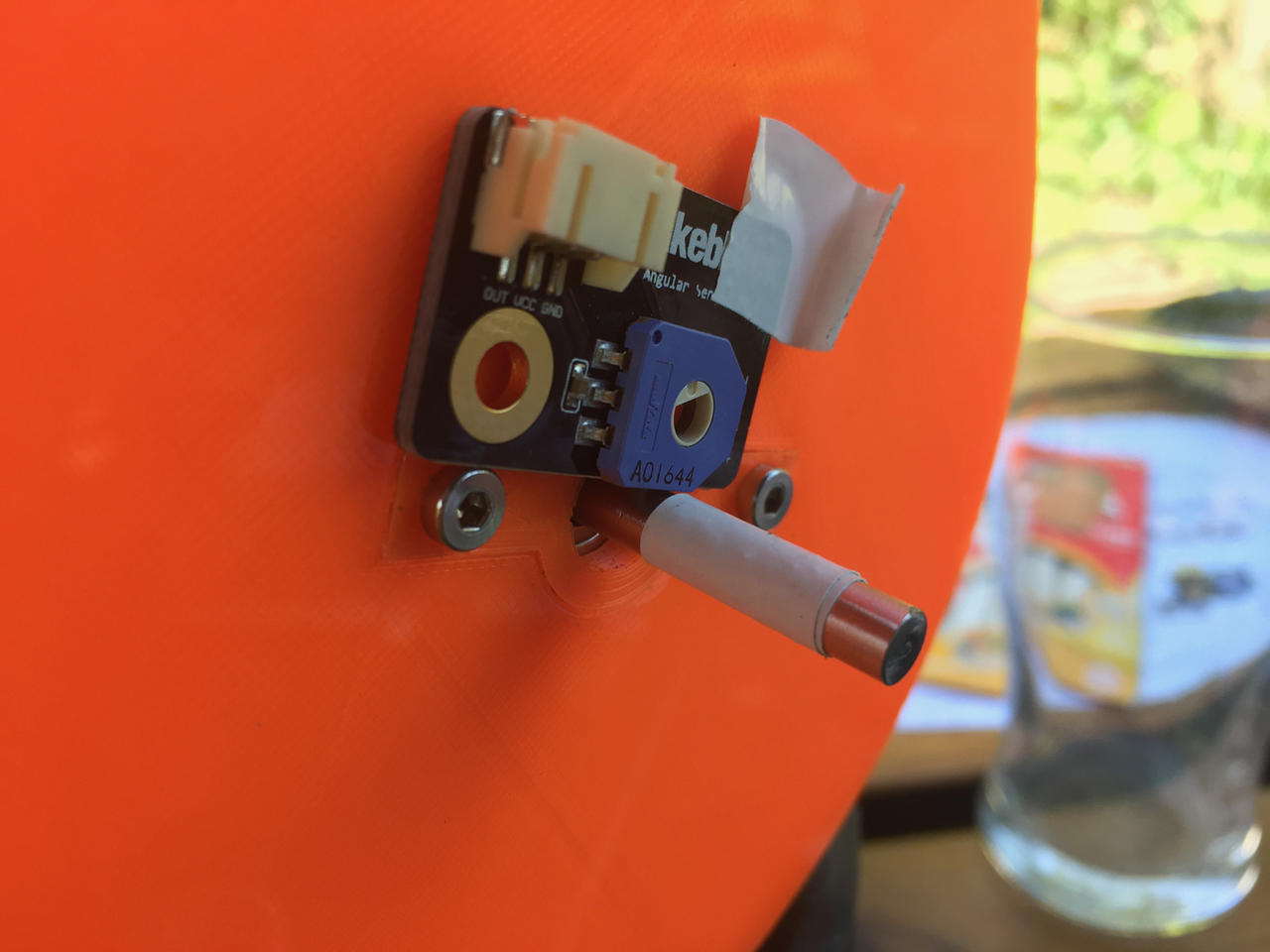
Now insert the Axle the correct way.

The potentiometer of the sensor fits.

All three Axles finished. I think I will created an extra plastic part with an extra bearing to mount between art 1 and art 2. This axis uses two small axles because the motors are inside the art 1 housing. On the gear side it is very sturdy. But on the other side it is hanging trough. If I mount a new plastic ring with another bearing to the black or orange part then it will become more firm. But before I will design this I want to be sure that I'am not missing any parts. Without the extra part I'am sure the potentiometer sensor will break.

Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
This is great work.
Are you sure? yes | no