 Sepio
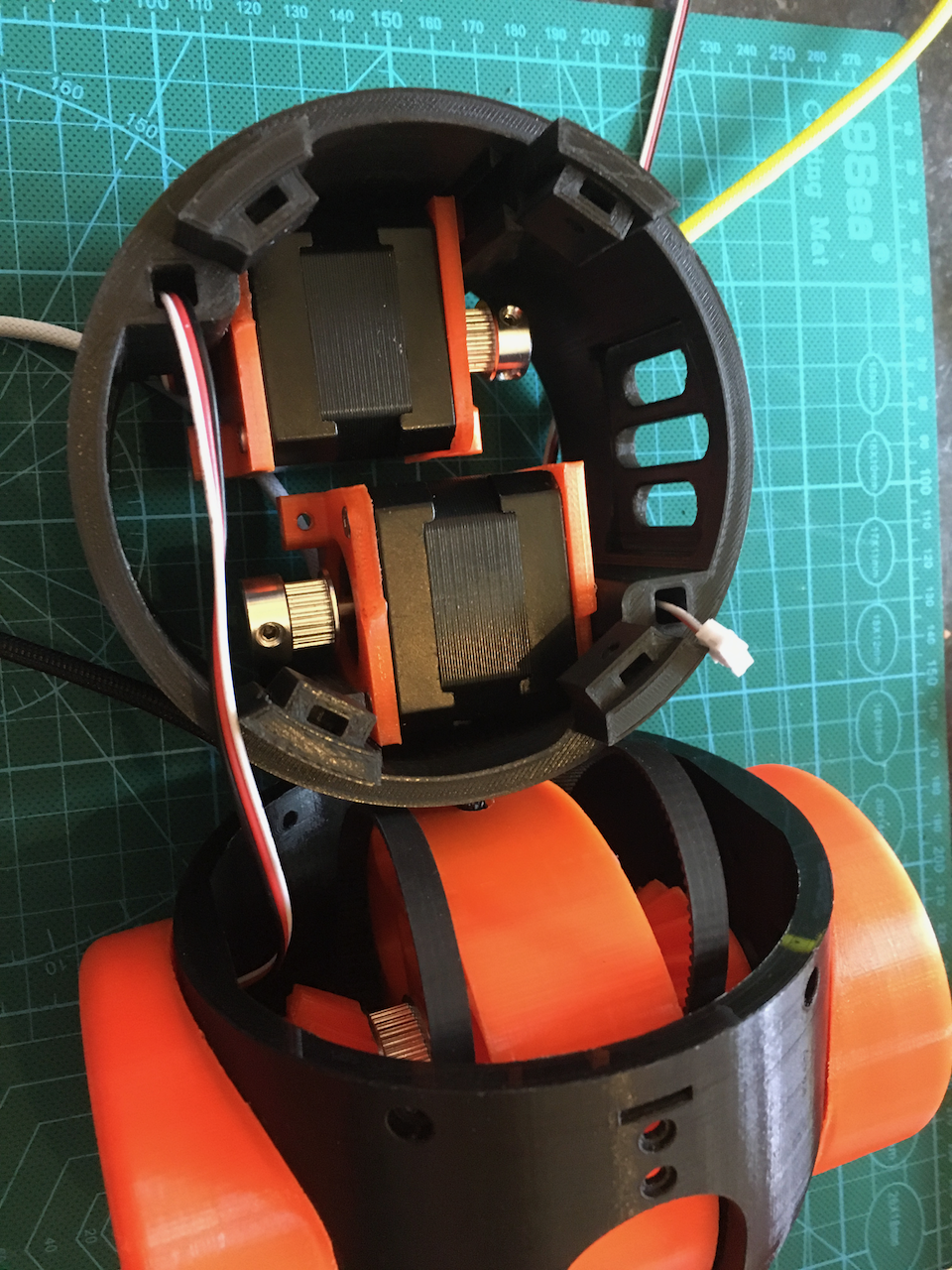
SepioI am happy with the current setup. I added support for the LPD3806-600BM rotary encoder. Its replaces the potmeter in the Base and in Art3LowerBody. (A rotary encoder makes it possible to continue rotating).
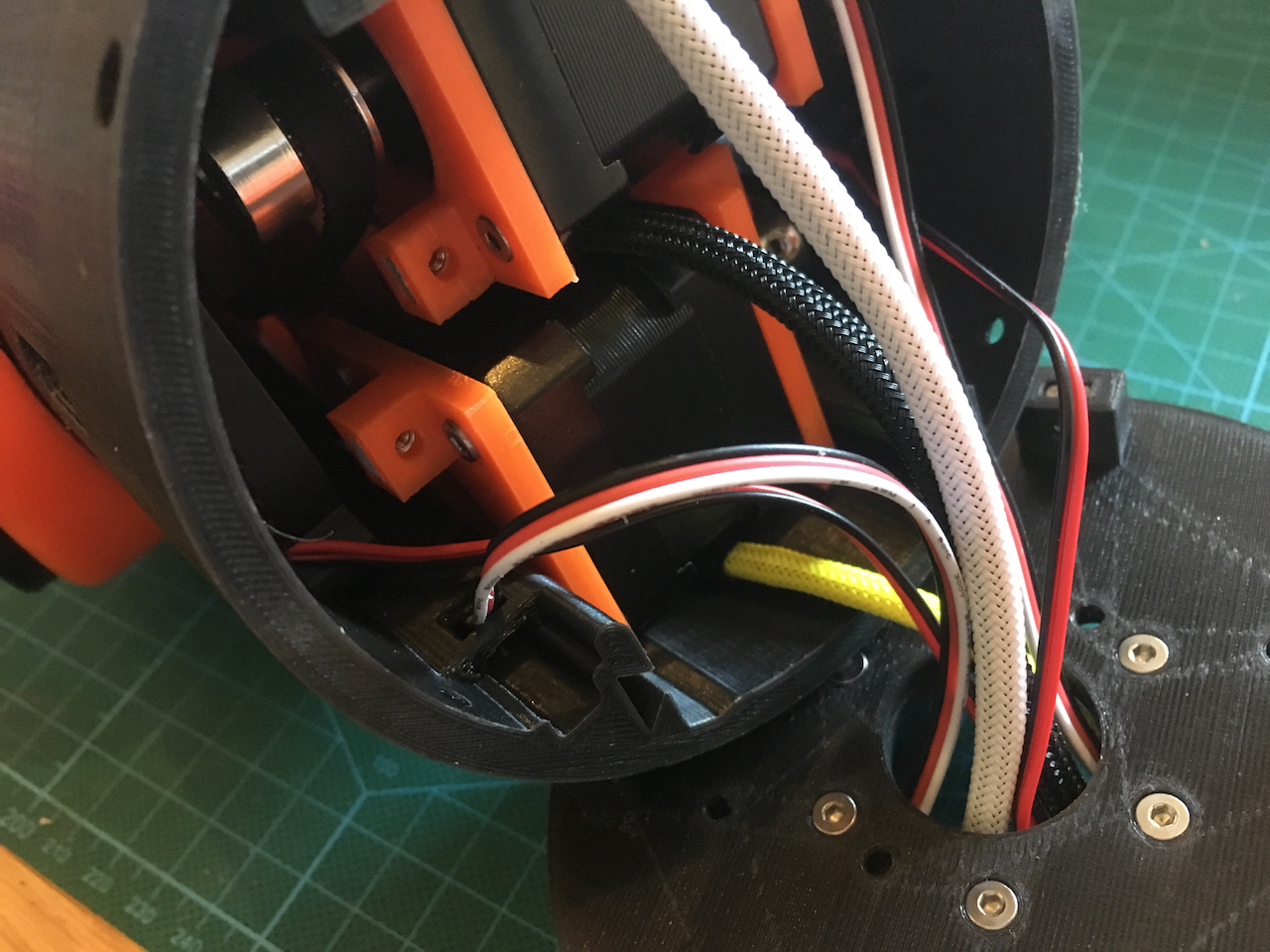
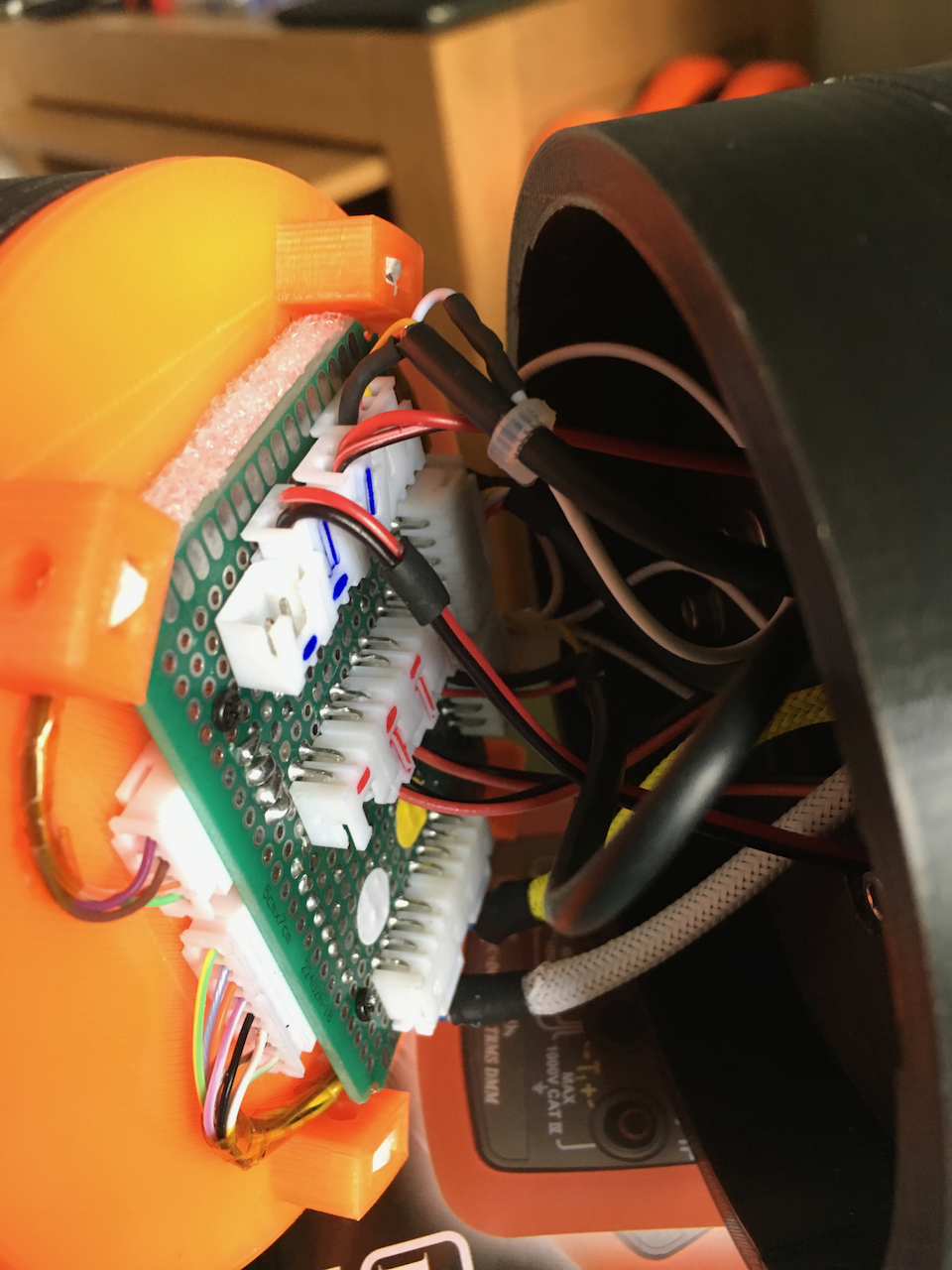
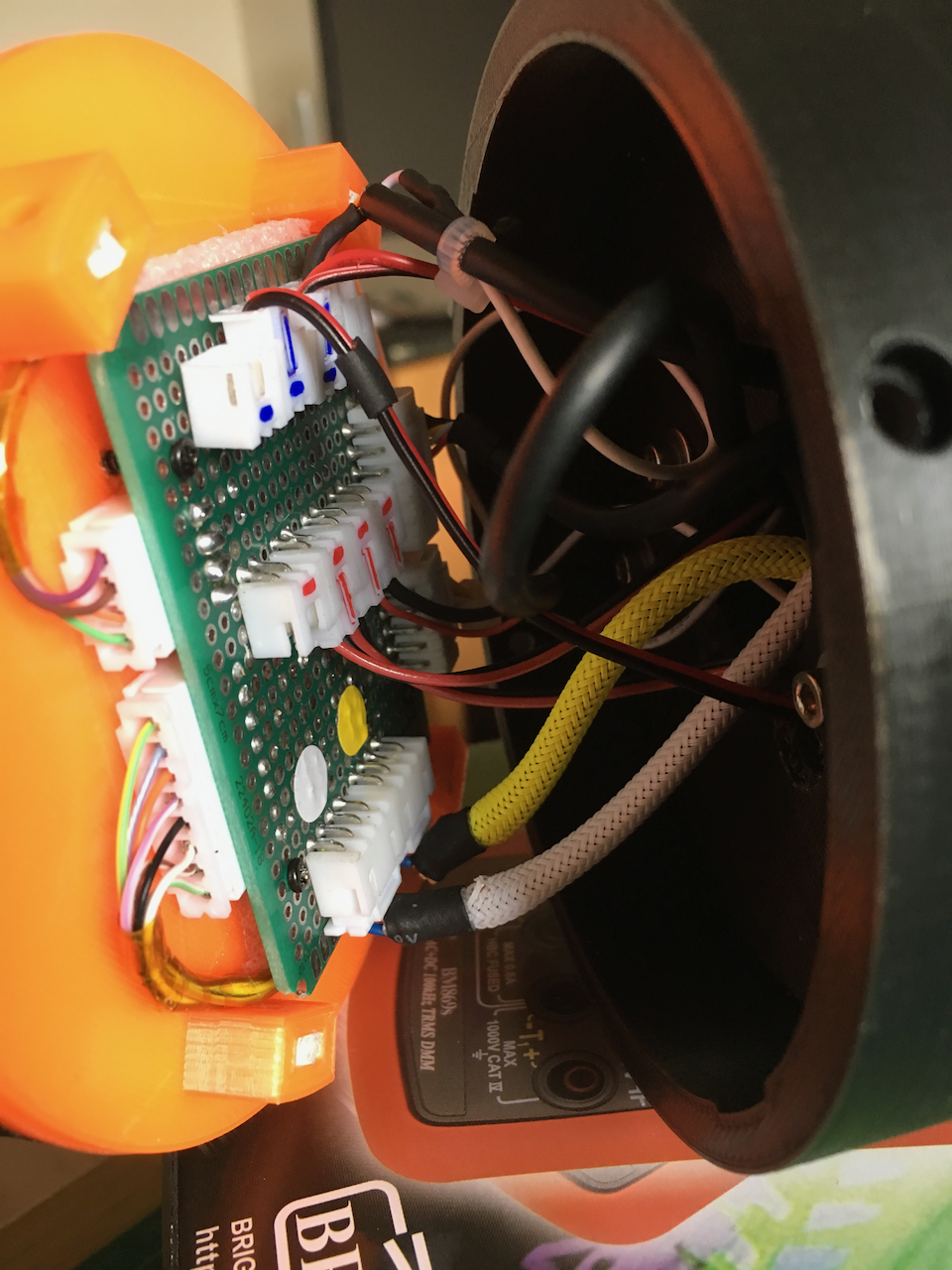
The wiring.

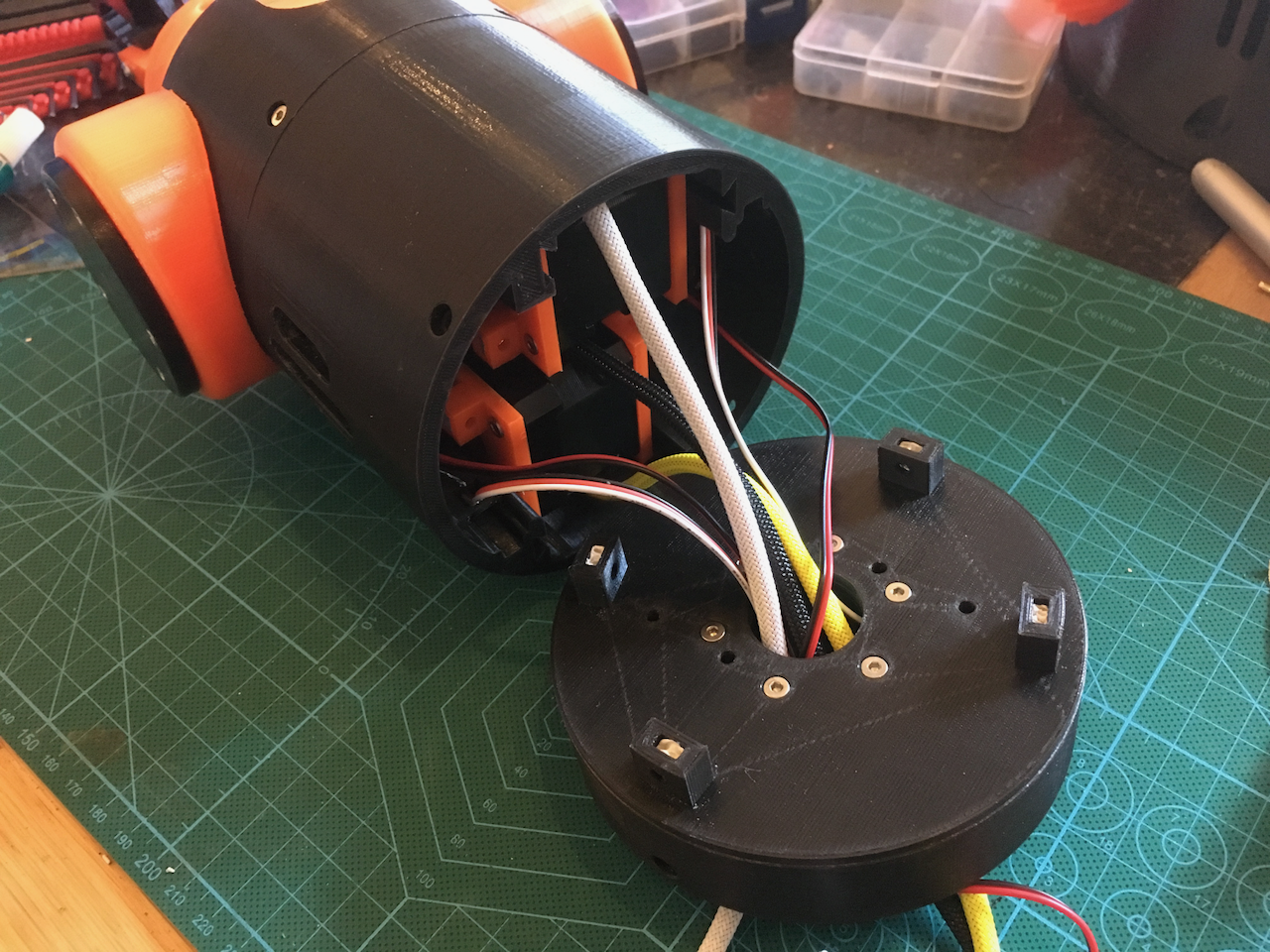
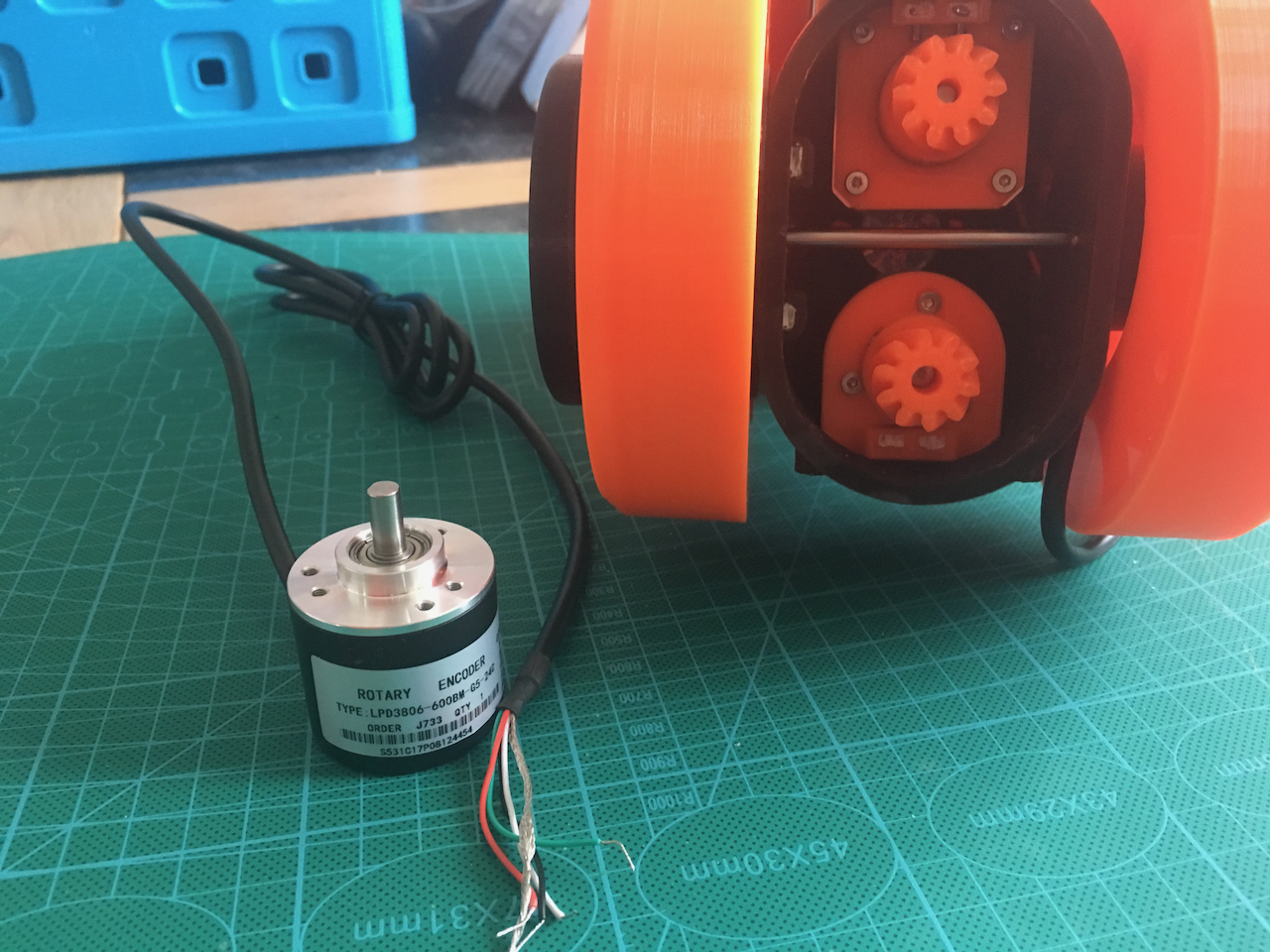
Fully assembled


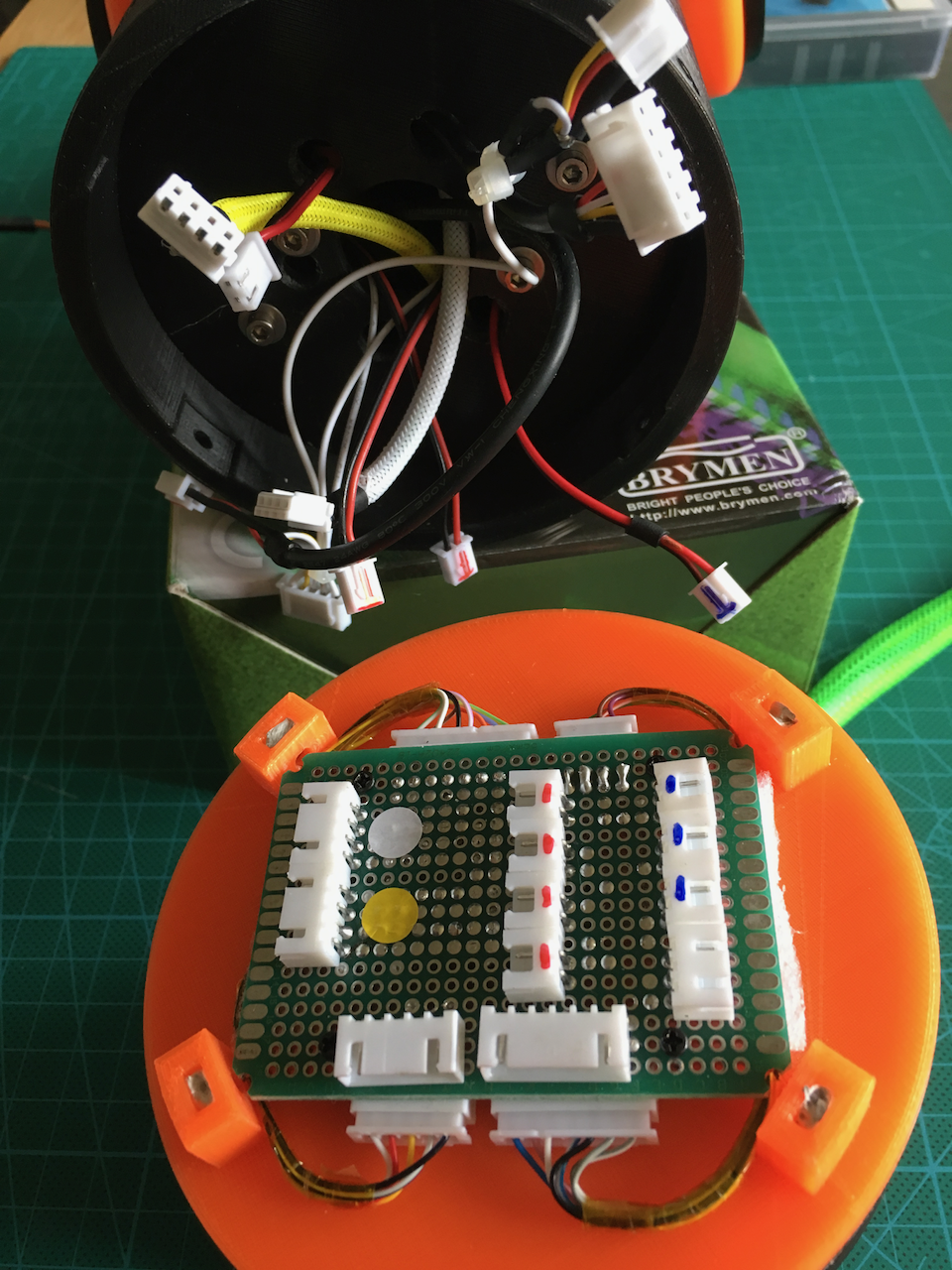
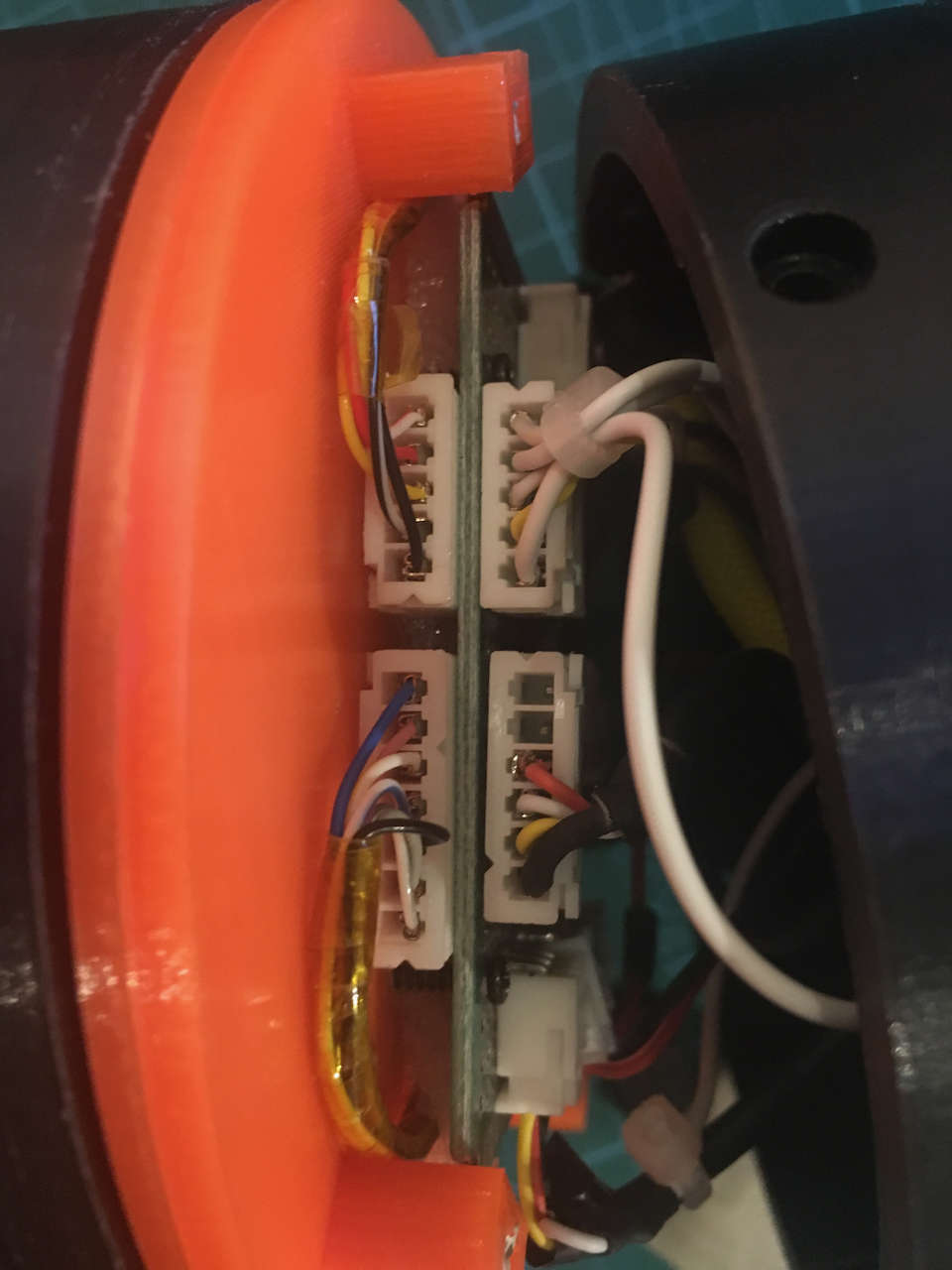
The PCB in the new compartment:
The rotary encoder I used (from ebay). It works with 5V and gives a 3.3V output which can be used on both the 3.3v due and the 5v arduino.
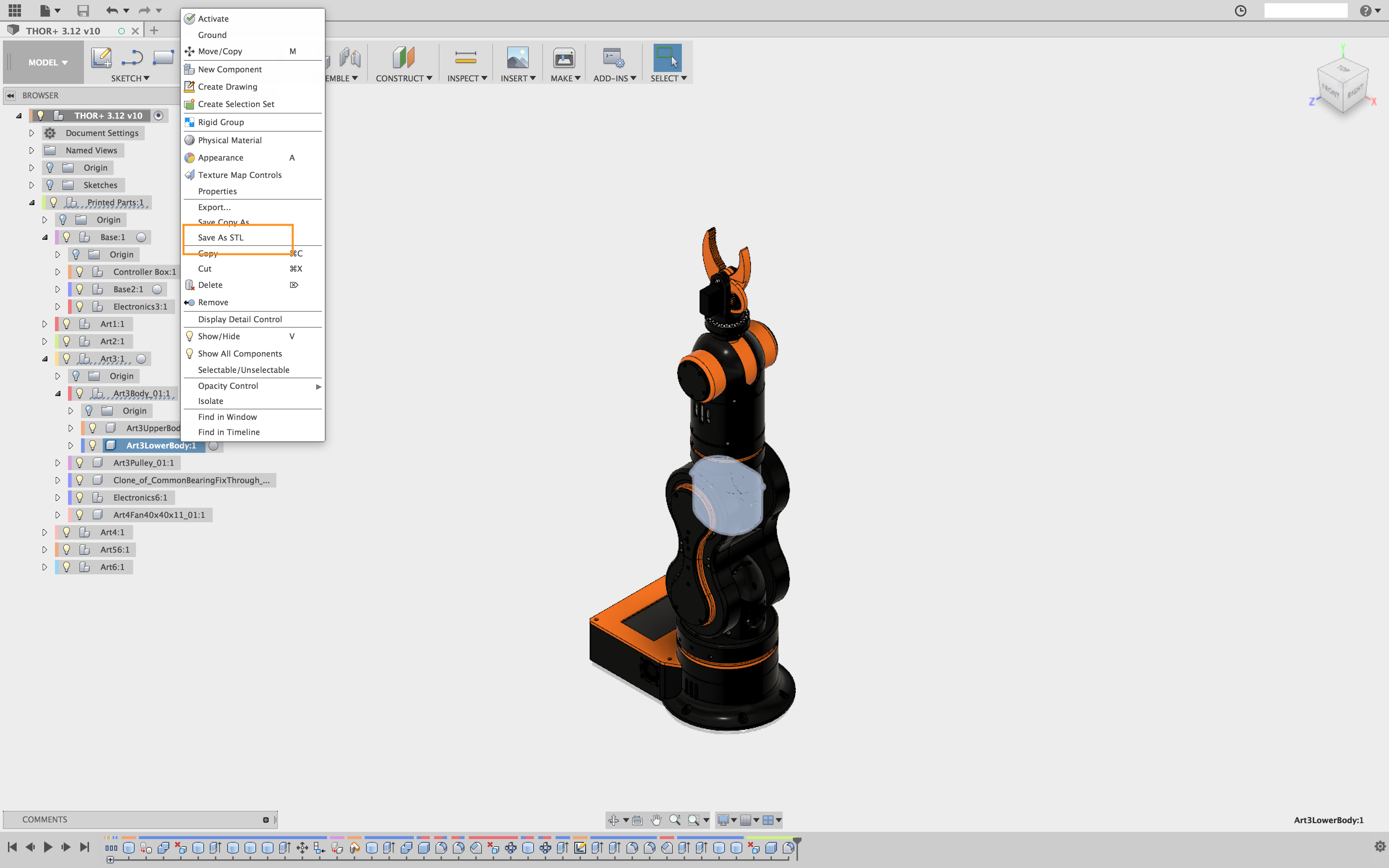
This version of the model is downloadable here: http://a360.co/2BDyFyW
(It takes a while for the browser to render. Or press the download button on the right top to download the model).
If you open this file in Fusion 360 (free for home use) then you are able to open the tree. Under "Printed Parts" you find all parts. Right click and choose "Save to stl" to make it printable.
Now I'am going to start to connect al wires and start developing the software.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
Why did you go with that rotary encoder instead of something smaller like the Bourns Absolute Encoder (EAW0J-B24-AE0128L)?
Are you sure? yes | no
Sepio, what brand are the white connectors that you use on your boards?
Are you sure? yes | no
They are called JST-XH connectors. If you look on eBay.com the. Search for “JST-XH kit”. And I use a “crimping tool pa-09” for crimping.
Are you sure? yes | no
That display at the controller. I think you may want to give that a angle because if you put your head to read what is on the display, it is basically putting your head in the moving part of the robot.
You may be more careful but children won't.
Are you sure? yes | no
I like that idea. There is enough room to tilt it.
I could also move it to an external unit. Then it’s easier to use.
The room on top can then be used for status (or in your case debug) leds and for buttons. ;-)
Are you sure? yes | no
You can also make use of the pendant I'm building, It has a raspberry pi3 and touchpanel, the complete program can be build in python with qt controls as graphical layer and sent the program through wifi to the arduino due controller in the robot. That's what I'm building for the moment. Look at my page for more info the next comming days :-) btw your modifications are brilliant! You moved the project again in annother level. Top man!!!
Are you sure? yes | no
I wait till you are finished with printing your pendant. I already have an mostly unused raspberry and 7 inch touchscreen at home. I really like your design skills.
But I also want to use the Nextion. I am now printing a new case in tablet style for it. It might be a good status monitor.
Are you sure? yes | no