 red.squid
red.squidThe goal of project C.A.T.P.O.O.P. is to build a prototype autonomous sailing drone that can be accessed and programmed with a phone via 4G networks. The drone will use GPS way points to navigate. It will also have sensors and a camera to provide visual feedback, telemetry data and environmental information.
The drone prototype is built around a 5'x3' trimaran hull made from laminated oak and PVC pipe. A water tight case mounted mid-ship will house the electronics, servos and batteries to operate simple sail and rudder control linkages.
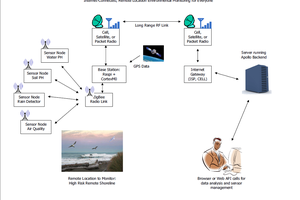
Using an Intel Gallileo and a 4G phone to control the sensors, navigation and communications, GPS coordinates will be sent from a custom app through commercial data networks. Visual data and sensor feedback will also be sent back via the app and made publicly available through a server.
This prototype will serve as a proof-of-concept for a larger solar powered ocean going craft for citizen science, public access environmental monitoring, navigational hazard detection and assessment, and early tsunami detection. The goal is to explore an open source platform for surface based marine robotics and to develop accessible and affordable concepts and techniques for the student, hobbyist and individual.
Team C.A.T.P.O.O.P. consists of Chris Willingham and Chuck Stephens from Tampa, Florida. Chris is a multi-talented programmer and developer with experience in a wide variety of platforms and languages. He is an alumni and current mentor with First robotics and has first hand experience with building his own custom robot chassis and many other projects. Chuck is an artist, hardware hacker and small boat builder who specializes in the use of recycled, repurposed and salvaged materials. He currently works as a consultant with Eureka! Factory to guide libraries in the process of establishing community maker spaces and developing maker oriented programs. Chuck and Chris met through their involvement in the Bay Area robotics and maker scene. They have worked together on several projects and hackathons over the past few years and have developed a good collaborative relationship that delivers results. This project has been in the ideation stage for months and Team Catpoop is ready for action!

 x3n0x
x3n0x
 Hunter Santana
Hunter Santana
 Charlie Smith
Charlie Smith
 hornig
hornig