 Kirill Salita
Kirill SalitaProject revisions:
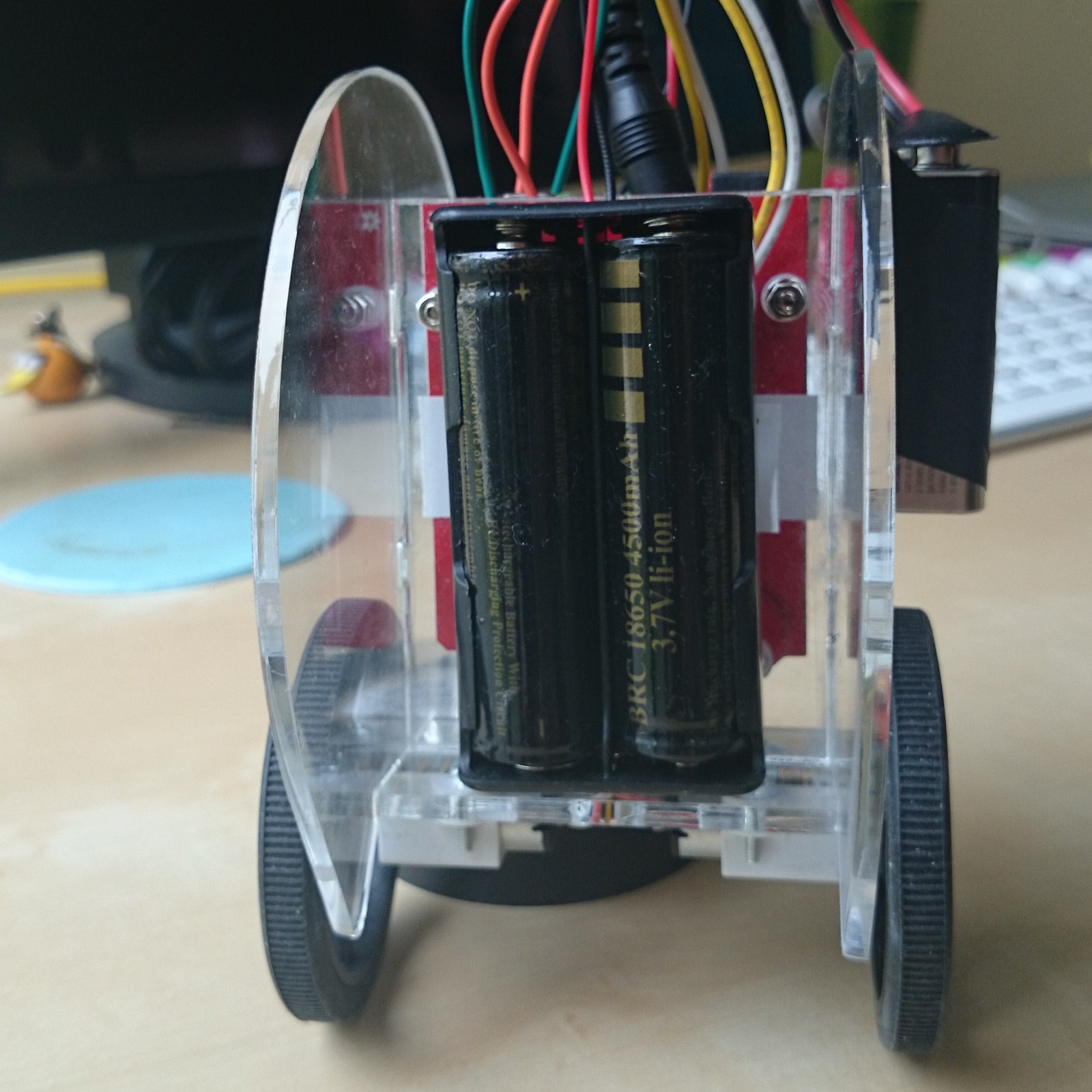
Rev1.0 - built in March 2014 with Arduino. Didn't sucessfully balance.
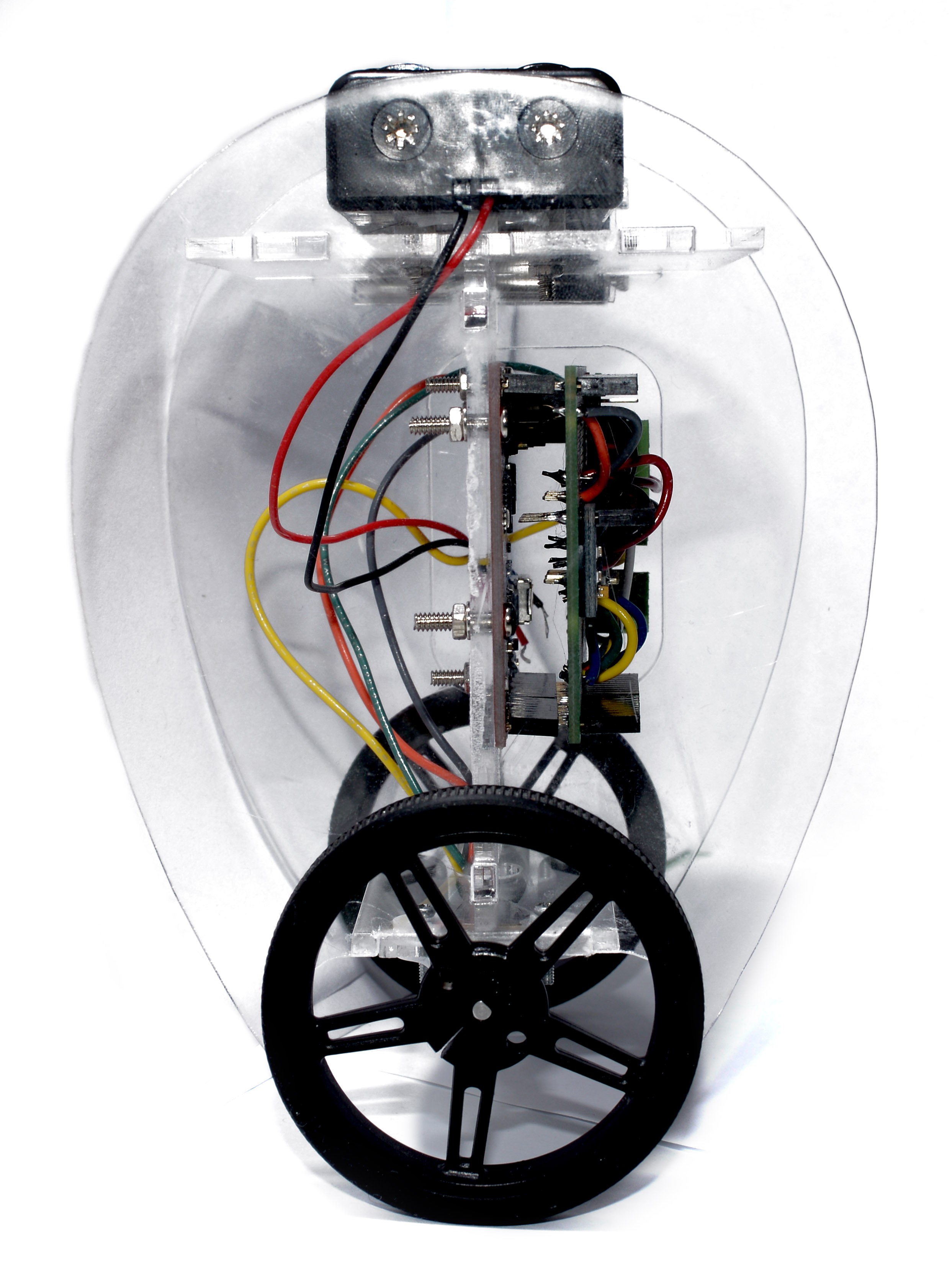
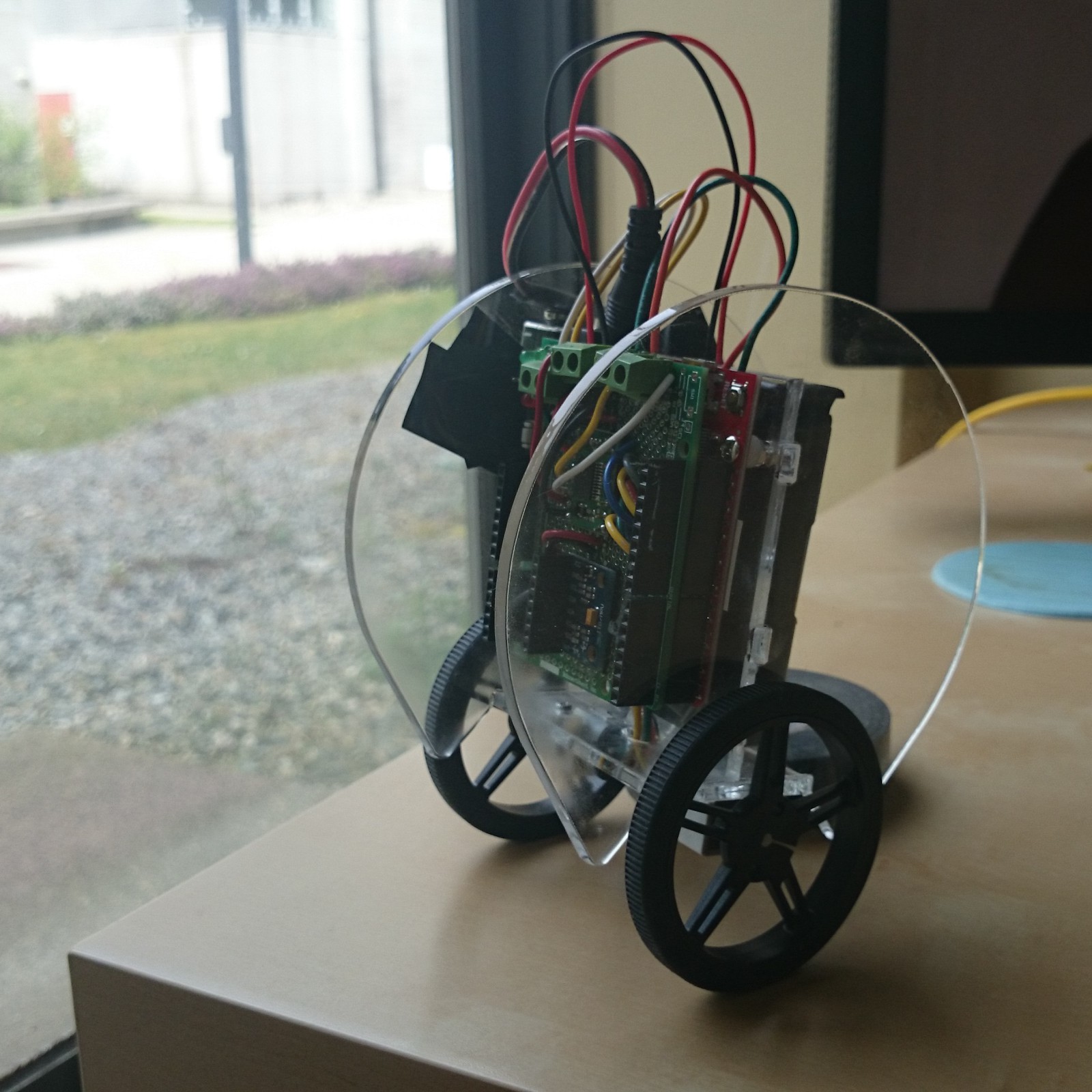
Rev1.1 - built in September 2014. Battery compartment moved to the top. Didn't successfully balance.
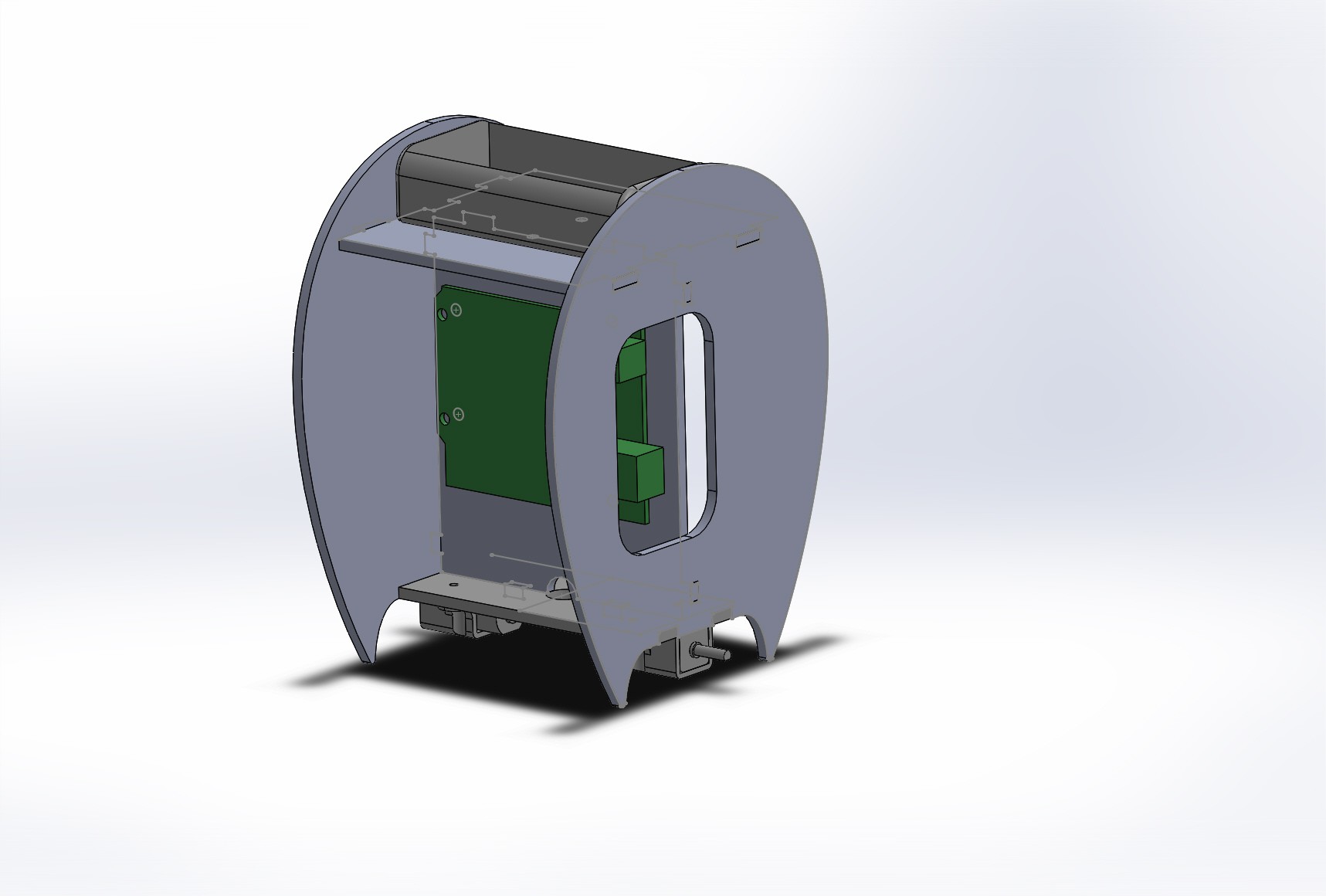
Rev2.0 - currently in design stage with ARM microcontroller.


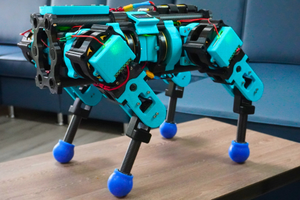
 Aaed Musa
Aaed Musa
 Shifty
Shifty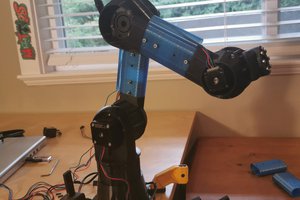
 Mattias
Mattias
 lbinder
lbinder
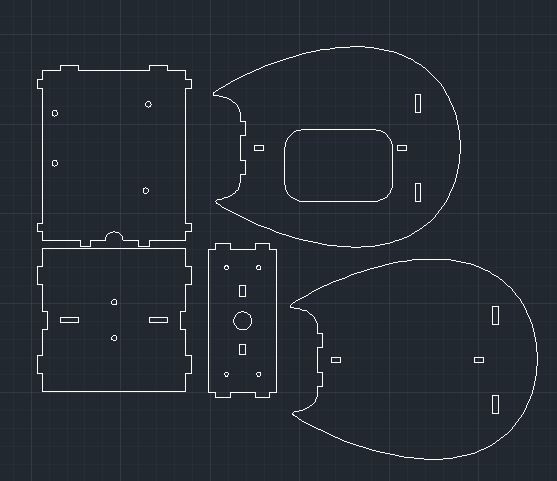
I like the rolling friendly cut of the acrylics!