0%
0%
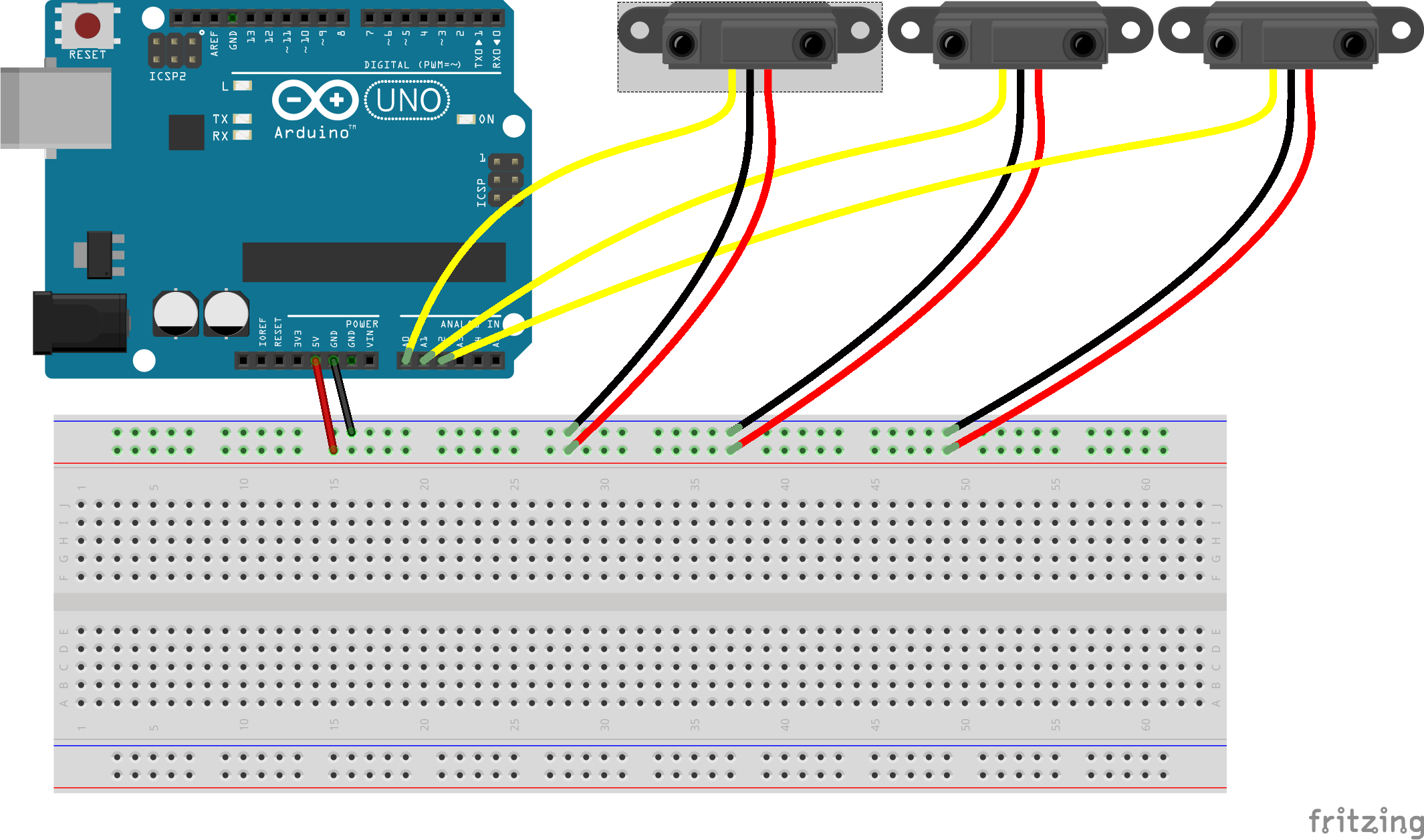
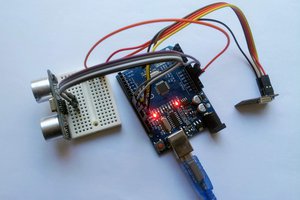
ThIRd Eye: Ground Level Detection for Wheelchairs
Using three IR distance sensors, this mounted system can detect drop-offs and obstacles at ground level and alert the wheelchair user.
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests
 AskSensors
AskSensors
 johan
johan
 StanislavJochman
StanislavJochman
 UTSOURCE
UTSOURCE
nice project, but coulndt sunlight be a problem? or is the "sensor" able to handle things like that?