 Samuel A. Falvo II
Samuel A. Falvo IIHow will the Kestrel-2DX be world changing?
By letting me bring the Kestrel-3 into existence, it will be an instrumental in helping me to fight such nonsense as motherboards with EULAs, the industry's inexorable march towards appliance culture, and thus restoring hackability to the computer's owners.
You can read more about the technical, social, and political motivations behind the Kestrel Computer Project on the official page or on my main Hackaday KCP project page.
OK, so how will the Kestrel-2DX help bring up the Kestrel-3?
In two important ways, actually.
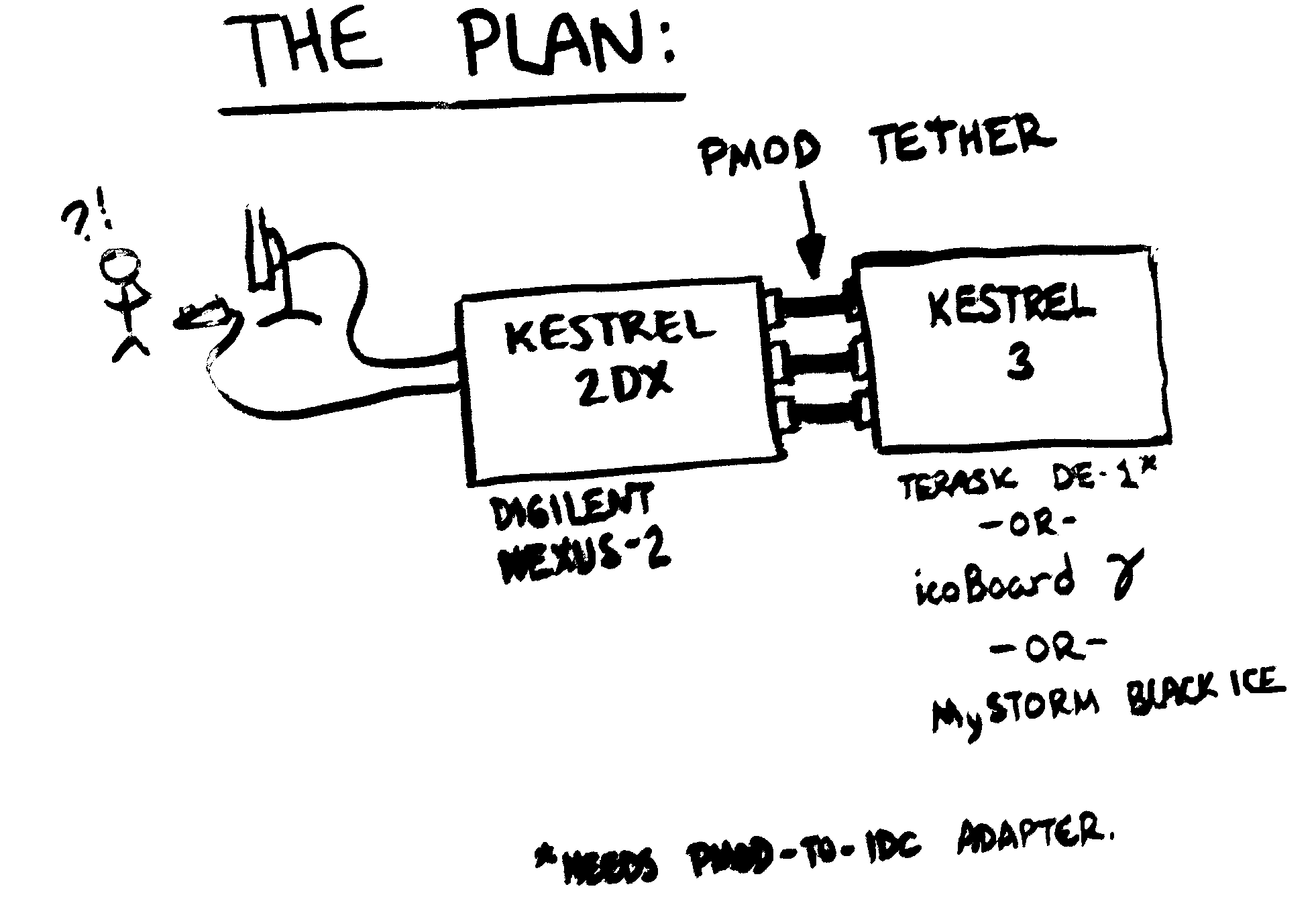
First, and foremost, it'll make viable workbench computer. Like a Commodore PET or TRS-80, the 2DX will have directly accessible I/O ports. This will allow it to interact with its environment without a bunch of fuss. You might think, "Yeah, but an Arduino can do that!" However, Arduino-based designs usually doesn't have a keyboard and monitor with which a user can directly interact. If they did, it'd consume their entire set of resources. Alternatively, you'd need to interface to it with a bunch of USB-to-whatever adapter cables, which I'm sorry, is just a pain in the posterior. These adapters are relatively expensive (as I write this, USB-to-RS232 cables average 5x the cost of a typical ESP8266 module with USB cable) and constantly missing when you need them most.
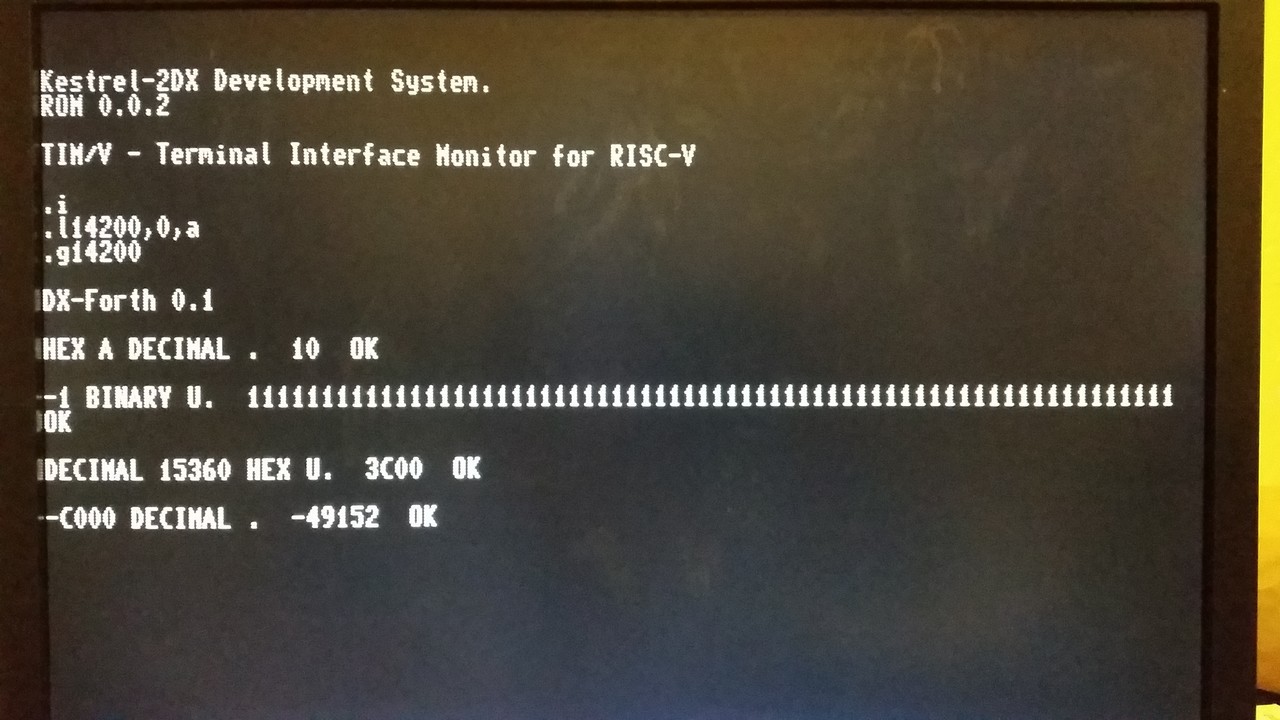
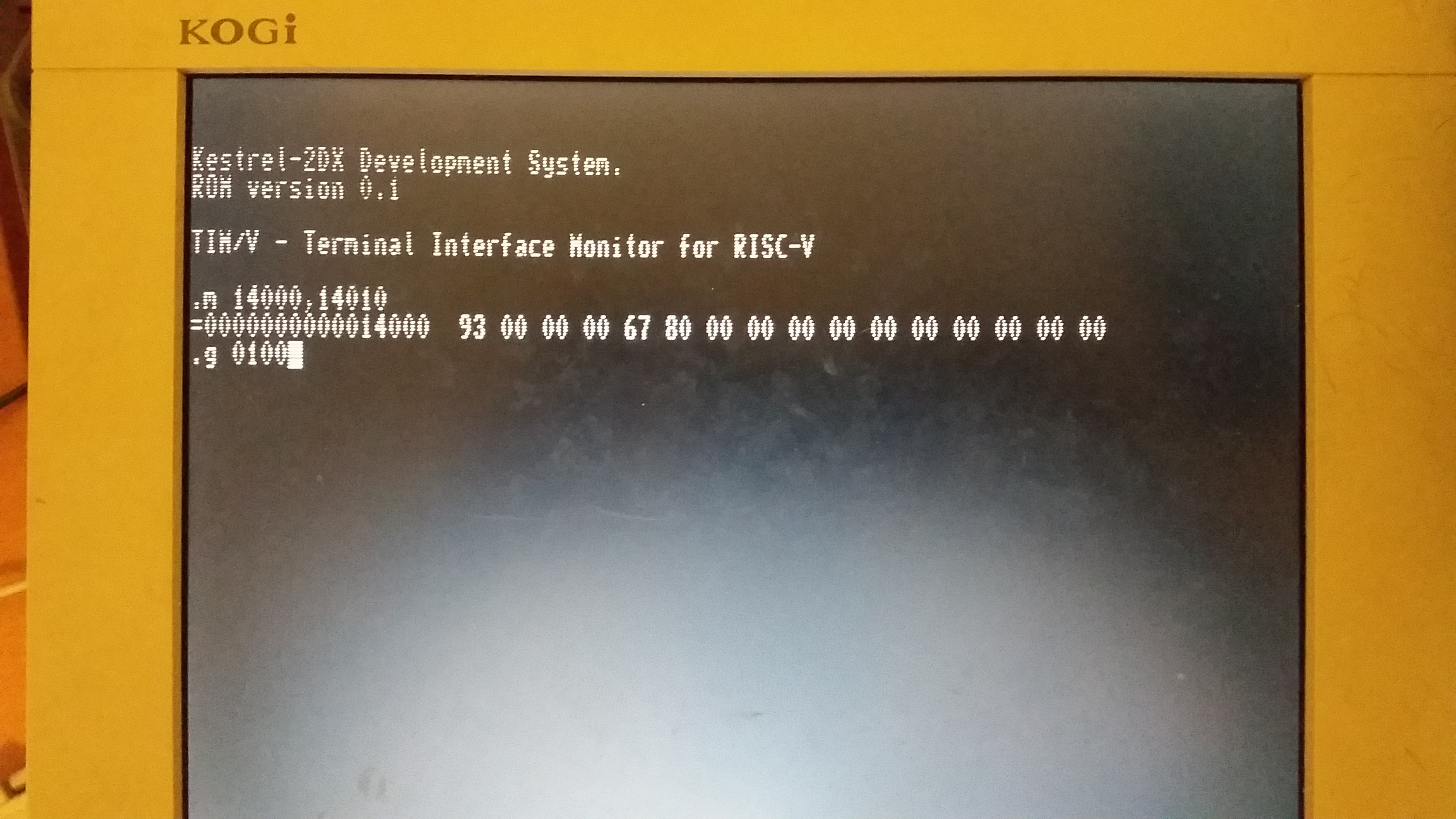
The Kestrel-2DX fills a nice niche here: I intend to program it interactively to serve various bring-up and monitoring functions as I'm raising the Kestrel-3. This is not unheard of in computing history: the VIC-20 and Commodore 64 were both brought up with the help of Commodore PETs; Atari Jaguar was brought up with the help of Atari STs, etc.
Second, the FPGA design files themselves can be used as a foundation for the Kestrel-3. As the project description indicated above, the new set of design files are designed to make evolution much easier. Switching the old, stack-based CPU out for the 64-bit RISC-V CPU is the first step in making this transition. It's also, relatively speaking, the most expensive and riskiest.
 Beyond the Icoboard Gamma/Black Ice Boards
Beyond the Icoboard Gamma/Black Ice Boards
 Matt Stock
Matt Stock
 Stephen Holdaway
Stephen Holdaway