 Rupert Young
Rupert YoungThe Lego motors are not powerful enough to take the weight of the leg and maintain a position. So, I have built a gearage system which has two objectives:
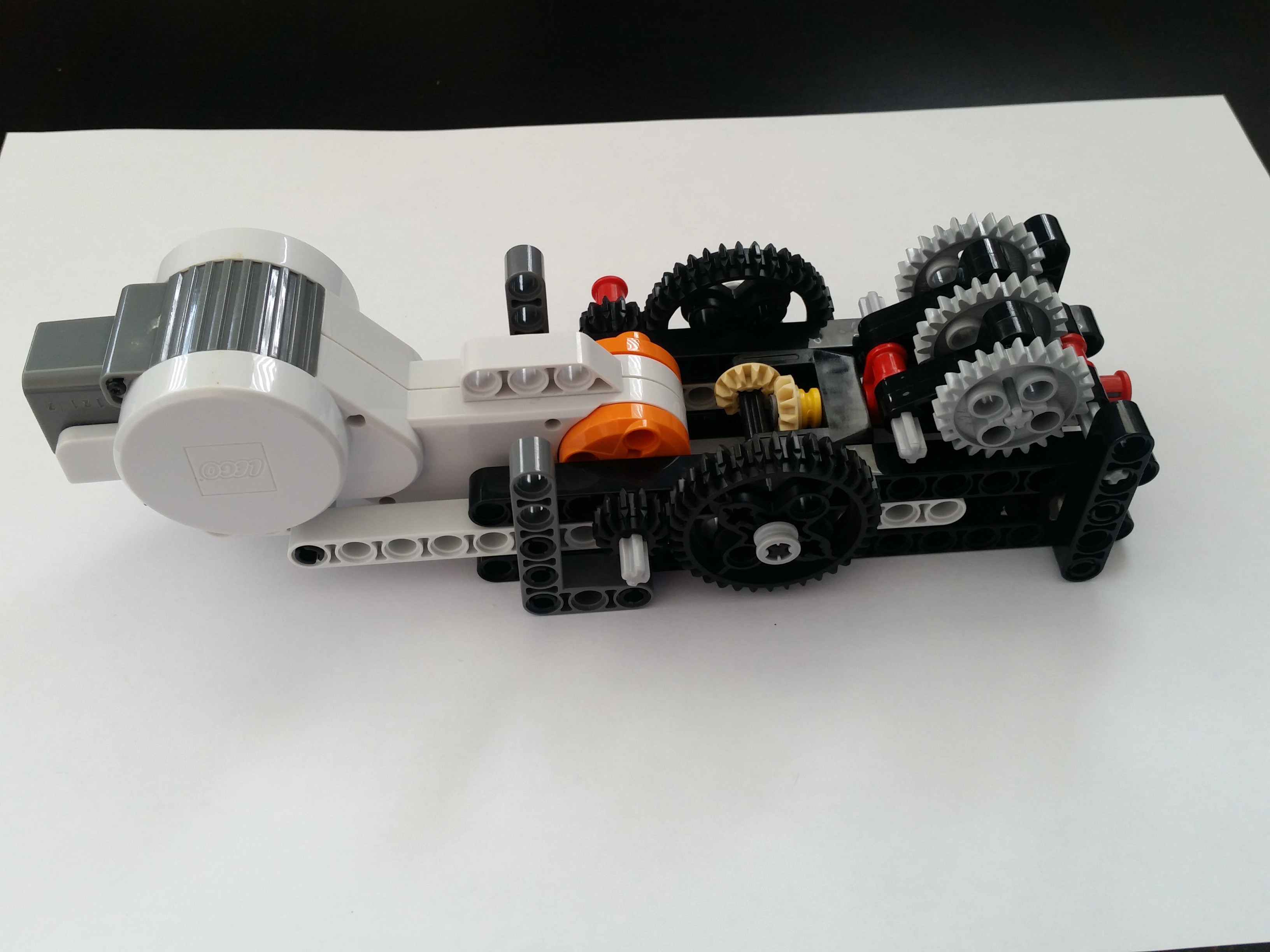
- to increase the torque to the driveshaft by gearing down from a small to large gear,
- drive the joint with a worm gear so that it locks in place when not in motion, so not putting exertion on the motor. This requires a perpendicular change in drive rotation which is done using single-bevel tooth gears.
This image shows the gearing down and the bevel direction change.
This image shows the underneath of the chassis with the worm gear and the bevel direction change.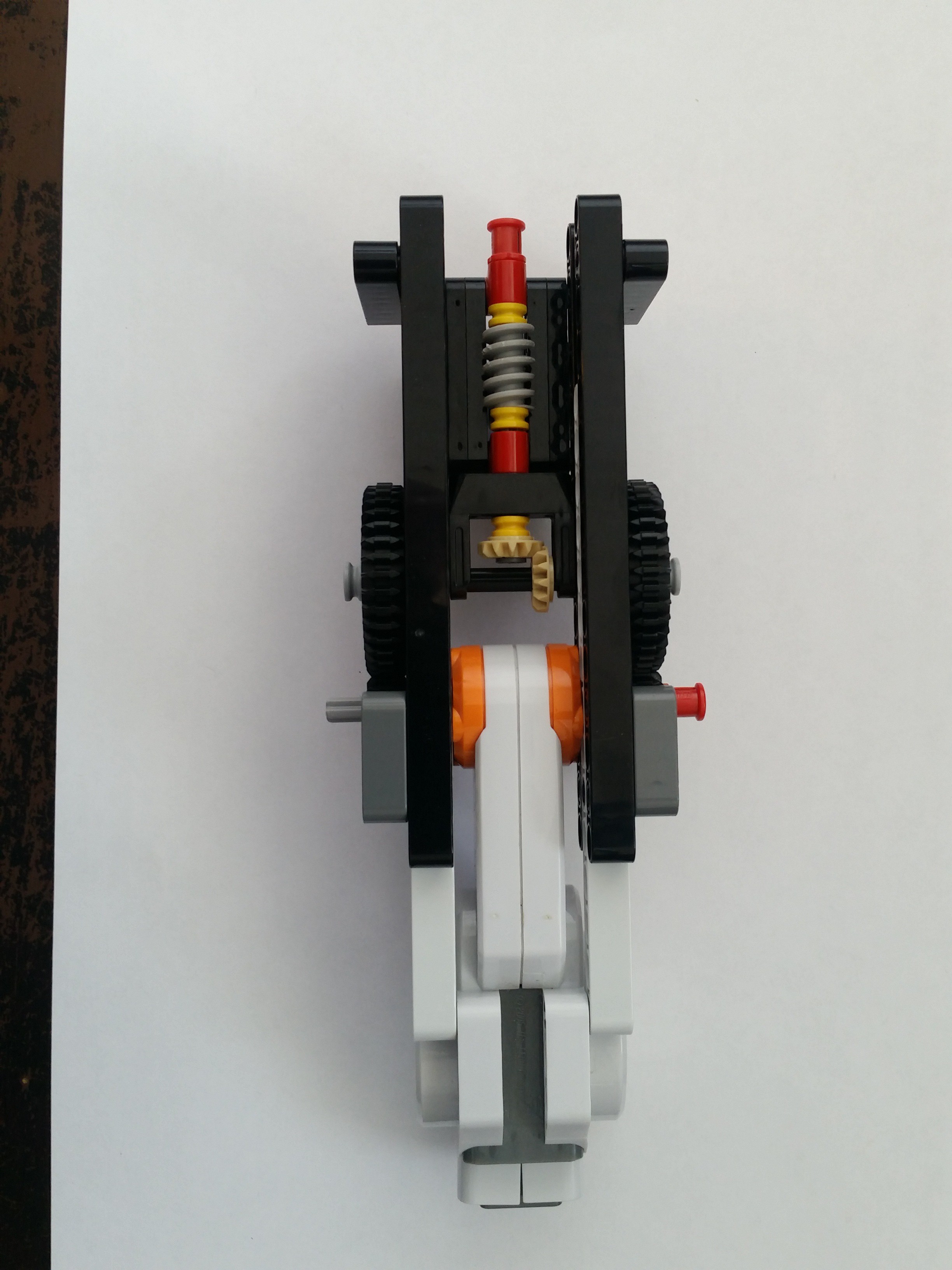
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.