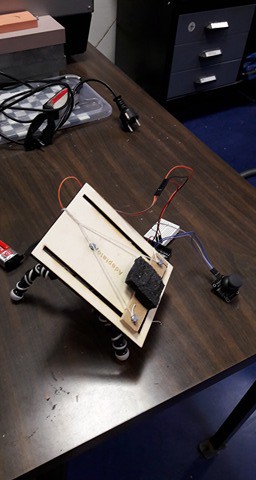
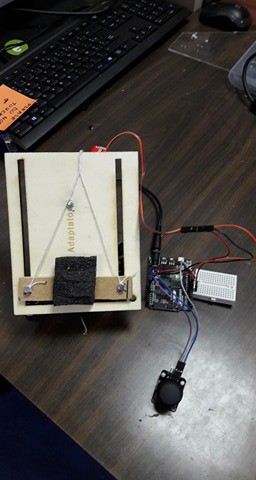
Once the basis of the Adaptator X was created, an electronic system was added to control the rise level of the horizontal bar holding the phone.
The main board was pierced, and a flexible camera tripod was fixed to it with screw and bolt.
An Arduino Leonardo card (https://store.arduino.cc/arduino-leonardo-with-headers) was programmed to control a perpetual servo-motor (https://www.pololu.com/product/2820).
The code allowed the motor to be controlled by a joystick, the servo-motor direction was controlled as well as the rotation speed.
The Arduino was linked to a joystick, the servo-motor and a battery.
The two strings were glued to the rotor of the servo-motor, and the motor was glued to the back of the main board.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.