0%
0%
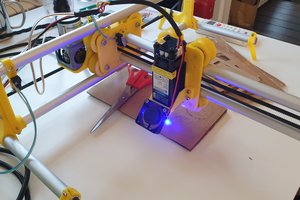
Robotic Table Tennis Ball Machine
This project will be able to give the receiver all possible types of spin and shoot accurately at any part of the table.
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests
 Maximiliano Palay
Maximiliano Palay
 Will F.
Will F.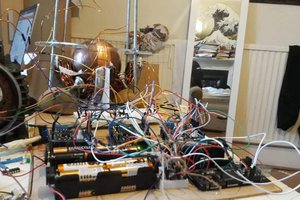
 Alex Dunnett
Alex Dunnett
 Kyle Bartholomew
Kyle Bartholomew
It become my first time bending hardtubes (PETG) I screwed up a few times, however these are generally hidden through the timber to clean ping pong paddle. All bendings are loose fashioned with a silikon inlay. I discovered it easier that way, once I were given the cling of it.