 Eric Link
Eric LinkThis project is attempting to create a low cost scanner that can be relatively mass produced. This would allow makerspaces and homes to have access to a relatively decent scanner. I hope that this project will eventually garner a community and improvements will ensue.
0%
0%
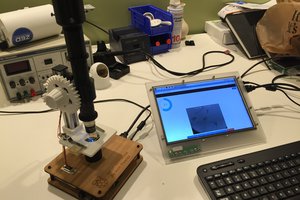
3D Scanning utilizing Photogrammetry
A senior research project to create a 3D scanner utilizing multiple raspberry pi camera modules
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests

 Warren
Warren
 Conrad Farnsworth
Conrad Farnsworth
 Markus Dieterle
Markus Dieterle
A way to improve rotation of the platform to reduce the jerky movement is to move the stepper motor from the axis of the platform to the edge of the platform. The idea is like a rack and pinion drive system. First, create a ring gear around the bottom of the platform. It can be plastic printed. Second, create a pinion gear and place it on the stepper motor's shaft. Third, mount the stepper motor below the the outside edge of the platform. Now, it will take multiple steps to produce even a slight rotation of the platform.
Place a grid pattern on the background sheet of paper. A plain, white sheet of paper has no reference points for the picture stitching algorithm.