0%
0%
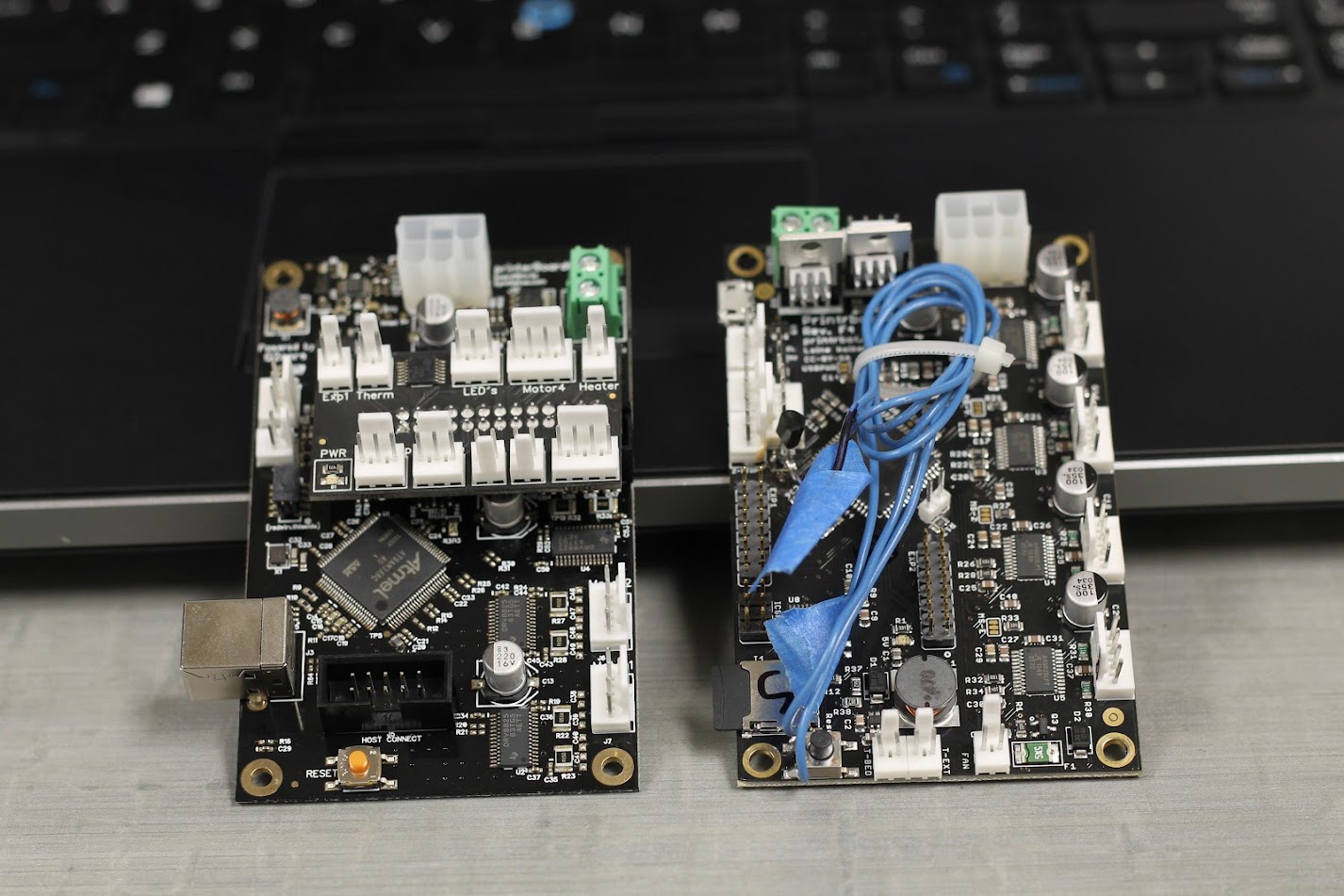
Quiet Printrbot
Adding external microstepping drivers to a 2014 Printrbot Simple Metal
 Christopher
ChristopherBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests









 joshua.vader
joshua.vader
 Sukasa
Sukasa
 Dave
Dave
 Nick Sayer
Nick Sayer
I'm considering this for my Printrbot. Do you have more details and instructions?