 Giovanni Durso
Giovanni DursoIn order to achieve the task of docking a multirotor for recharging a custom docking station had to be designed. Several designs were considered against the requirements in order to select the most appropriate.
Requirements
– Therefore be capable of 2 + 5 connections(power and balance) to 4+10 connections (for 2 4s lipos in parallel)
Mechanical battery swap
For this design the copter lands and a mechanism removes the battery from the copter and then switches in a fresh one from a cartridge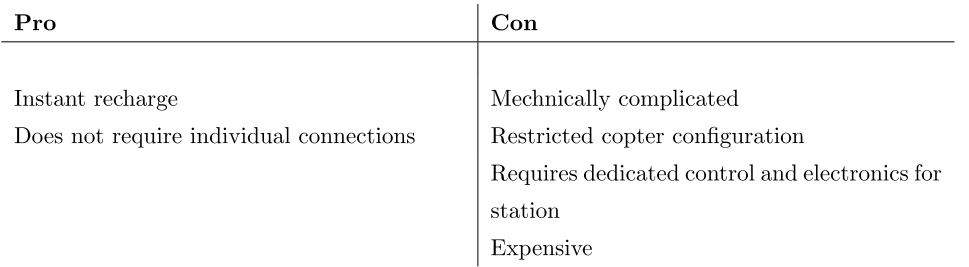
Mechanical gantry for alignment
For this design the copter lands on the target in the approximate area then an arm sweeps it to an appropriate position.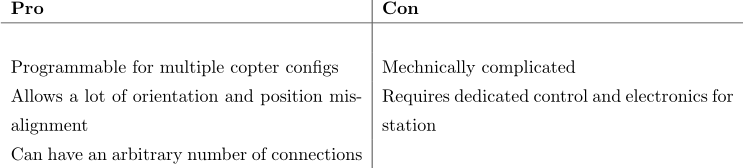
Big cylinder with notches
For this design the copter has contacts on the arms and lands into a cylinder with triangular notches to guide it into a resting position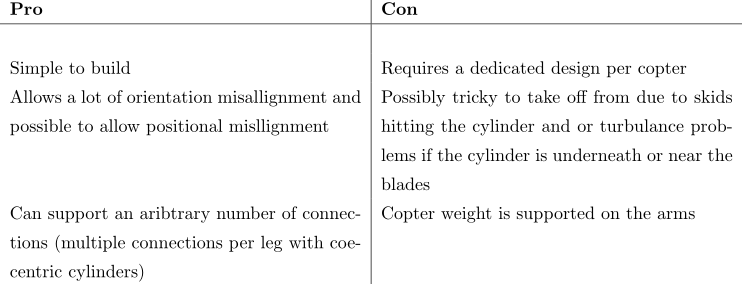
Guiding cones
This system is based off satellite style docking mechanisms with one side active and the other passive. The cone system fits over the camera and sonar assembly at the base of the copter and a cylinder with a raised section and a mating cone is placed on the landing target in such a way that the docking is complete when the landing skids barely touch the target.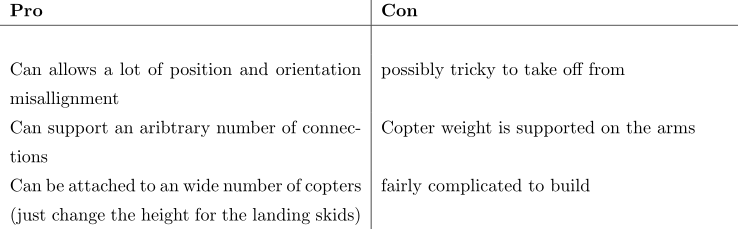
Arbitrary contact grid
This system is based off the idea of having metal contacts placed on the landing skids and a landing on a target with a number of contacts in a pattern that maximize misalignment
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.