 Giovanni Durso
Giovanni Durso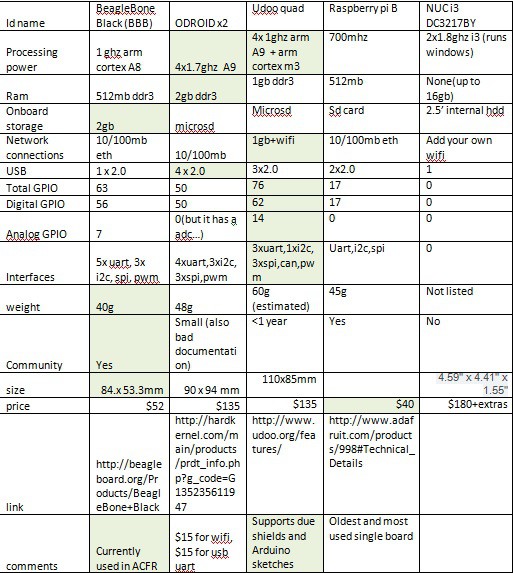
After considering the options avalible the three best possible solutions which are very close are the udoo, odroidx2 and the BBB.
The odroidx2 is the most powerful processing unit by far it is almost twice as powerful as the udoo and almost 7 times as powerful as the BBB (assuming that all the cores are fully utilised) it also has twice and four times the offering of ram as the others.
The downsides of the odroidx2 is that it does not have tha ardunio envrionment avalible on the udoo but since the FC(pixhawk) is receiving the sensor data it does not need many gpio pins itself. Also the selected sonar sensors have the option to use pulsewidth or serial transfer. It also has 4 uart, 3spi and 8i2c ports avlialbe so there is plenty of interfaces. The biggest downside is lack of good documentation and higher complexity to get things running due to having to deal with the linux to gpio interface.
But odroid x2 + console cable + wifi = much more powerful processing for vision / control modelling
With the pixhawk doing stabilisation/reading sensors and parroting the data over the uart
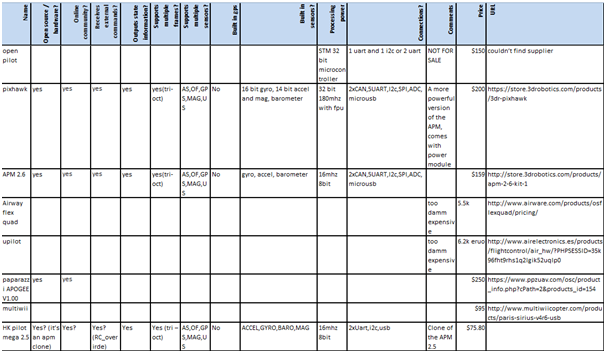
The selected autopilot will be either an APM or a Pixhawk
If the official APM is used then there is no real benefit to choosing it over the Pixhawk but if the arduflier or some other knock off version is considered instead than it may be worth it financially choosing it over the pixhawk
The final selected autopilot is the pixhawk due to the higher processing power which allows an extended kalman filter to be implemented which can lead to better state estimation. Another benefit of the pixhawk is the extra ports avalible for external sensors to be integrated with the software framework
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.