0%
0%
ICARUS Scout
The Scout is a tank-style robot.
 David Gitz
David GitzBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests

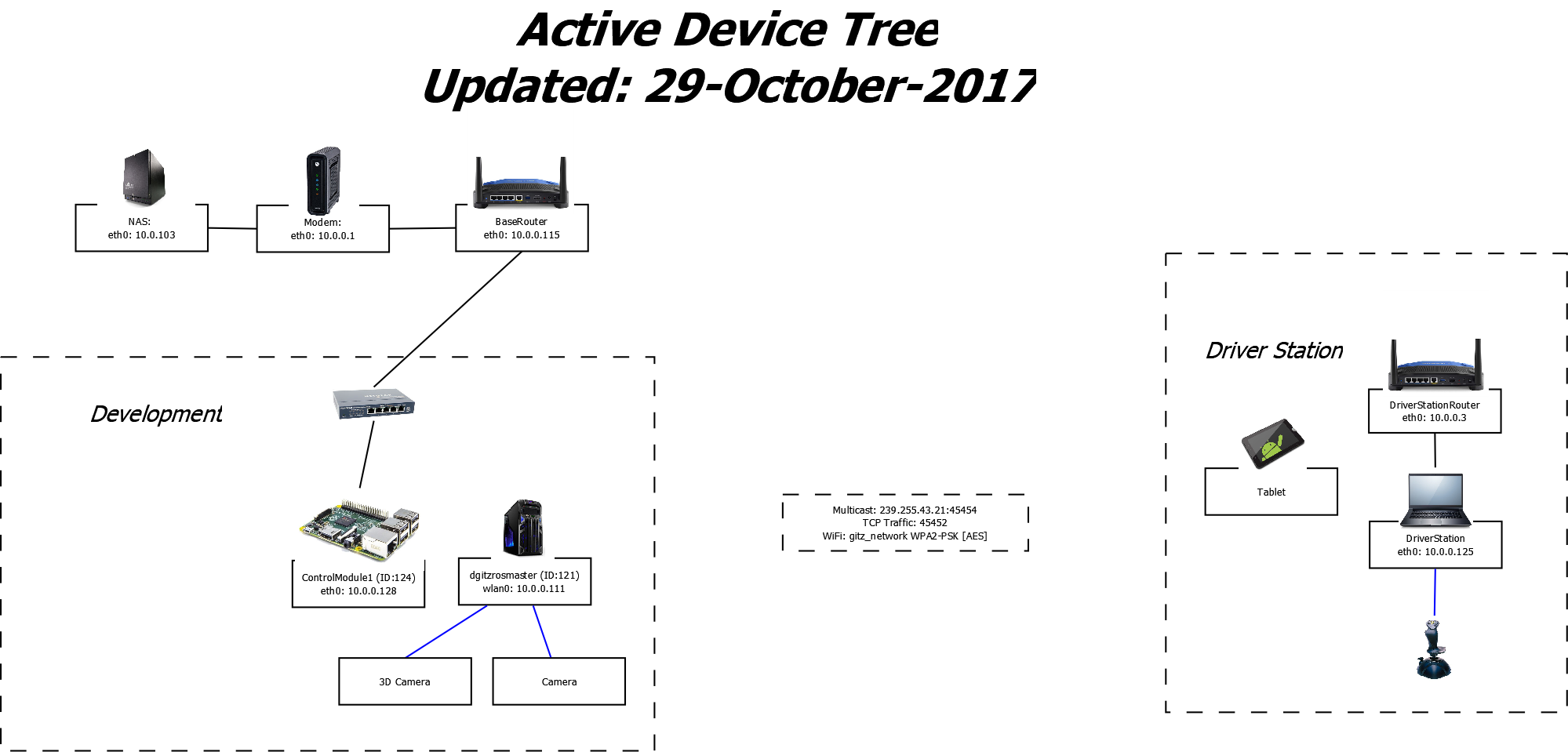 As can be seen here, devices are connected to each other over either a wired LAN or a WLAN network, but these 2 network segments exist on the same subnet. Any device that has a network interface can see any other device.
As can be seen here, devices are connected to each other over either a wired LAN or a WLAN network, but these 2 network segments exist on the same subnet. Any device that has a network interface can see any other device.

 jdelbe
jdelbe
 Kevin Cheng
Kevin Cheng
 Dillon Nichols
Dillon Nichols
 idun-project
idun-project