 allai5
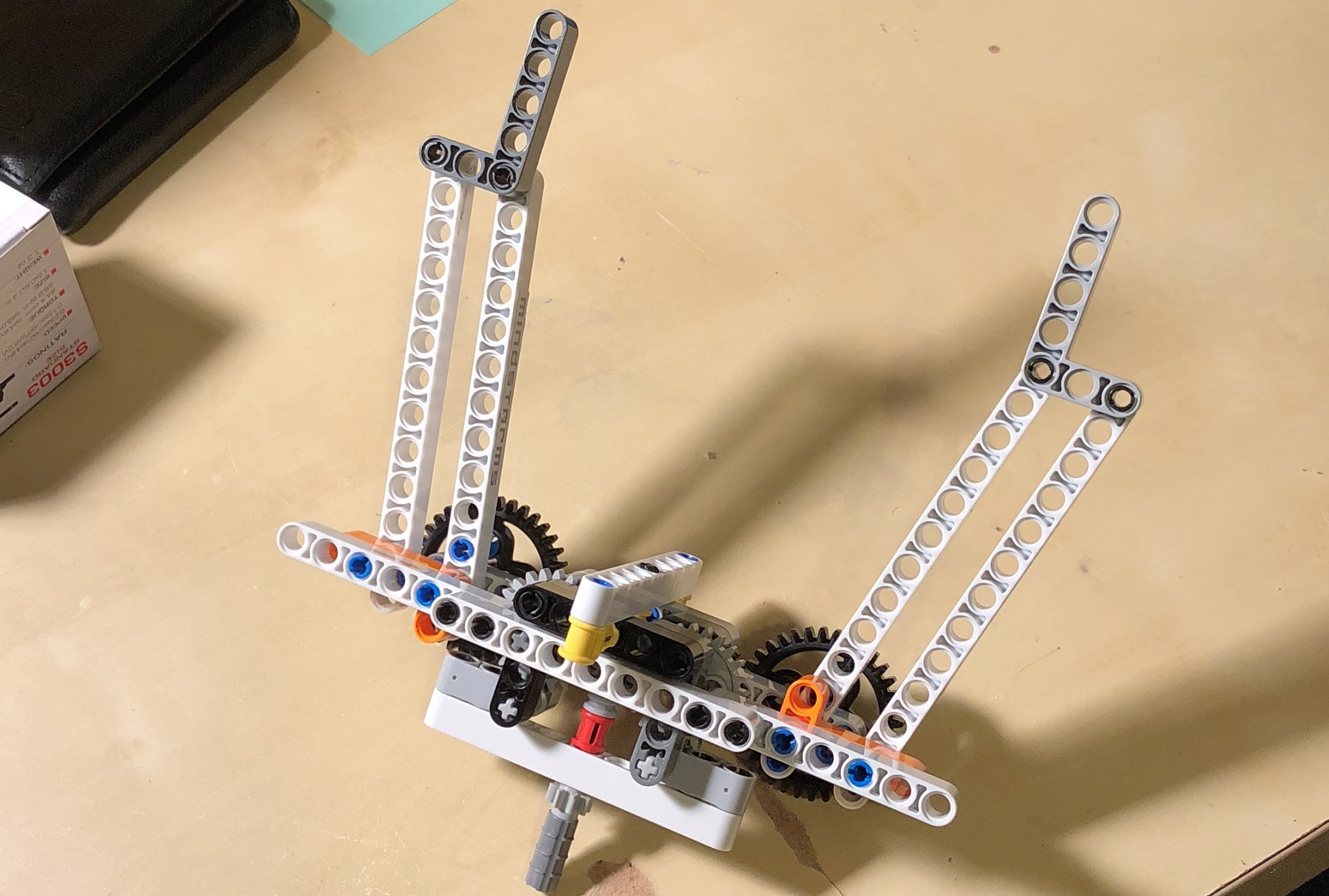
allai5We have a few different claw designs for Volturnus. We initially tried a simple Lego claw, but we found that it wasn’t secure enough for our 500 gph bilge pump motor. We then thought about implementing a passive claw design--this would be cost-effective and free a motor for something else--but it would be difficult to adapt to the variety of different obstacles found underwater. Finally, we were thinking about building a more professional claw with 3D printing and metal gears, but we have not yet been able to implement it. We will need to run more tests in the future to see which claw design will work the best. Perhaps this is something that we should approach from an angle of modularity?
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.