 allai5
allai5We needed an intuitive control scheme and a portable controller. After going through many styles of joysticks, from small 2-axis potentiometer joysticks to large USB joysticks, we' decided that the the XBOX 360 controller would be the most intuitive ROV controller. Moreover, an XBOX 360 controller can be commonly found in households, further lowering the cost for the ROV.
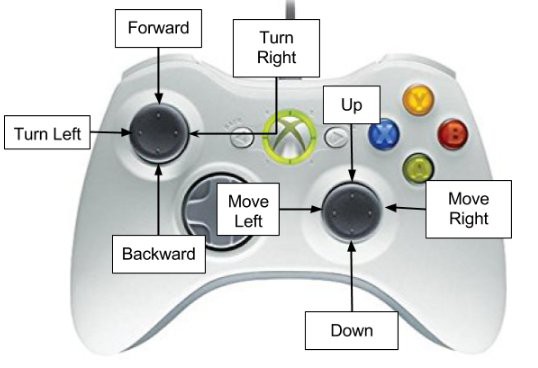
Although, this gaming controller has many joysticks and buttons, we only needed two joysticks to control all the motion on the robot. One joystick controlled forwards, backwards, and turning motion, while the other controlled lateral, up, and down motion. The joystick feedback was sent to a wireless receiver which was connected to a USB Arduino shield. We struggled with the receiver as the controller kept dropping its connection. We solved with this by doing several power cycles. Finally, we had developed a control scheme that was user-friendly and effective.

Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.