 allai5
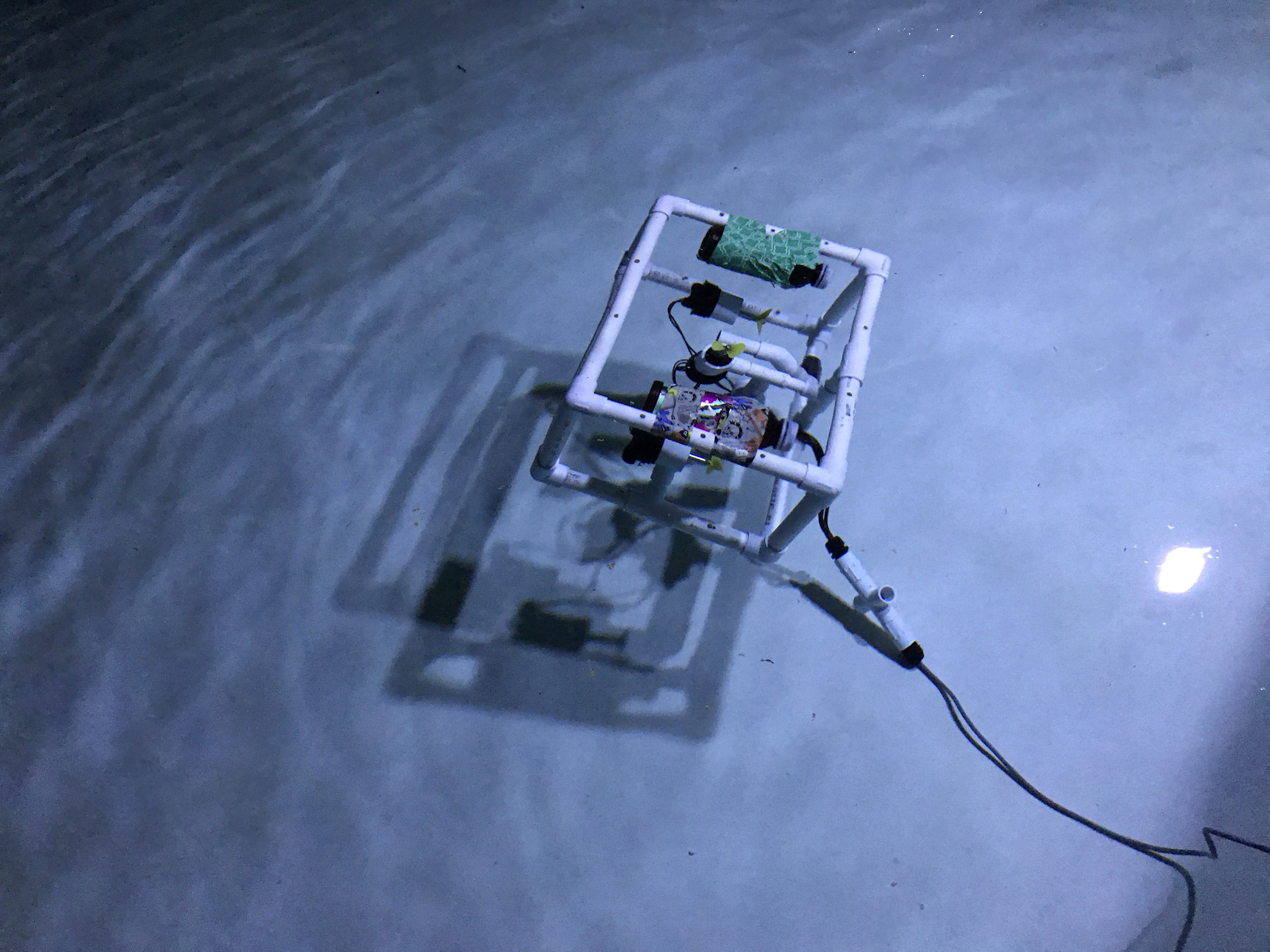
allai5We’re thinking about what to do next for our ROV. We would like to be able to implement filtration technology in addition to the detection technology that we already have, but we were also considering moving electronics to bottomside. This would greatly enhance our ROV as we could use more powerful thrusters and take in more sensor data. We would also like to try to test our robot in more real life scenarios. If we could actually monitor a body of water for an extended period of time, we would be able to see how to improve our robot so that it can be used commercially.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.