 shikang zhou
shikang zhou/

3D models : https://grabcad.com/library/rovmaker-edge-open-source-underwater-robot-1

Make tools to explore the underwater world and inspire everyone to become a DIY ocean explorer. Project by ROVMAKER. Based on Ardusub.
Already have an account? Log in.
To make the experience fit your profile, pick a username and tell us what interests you.
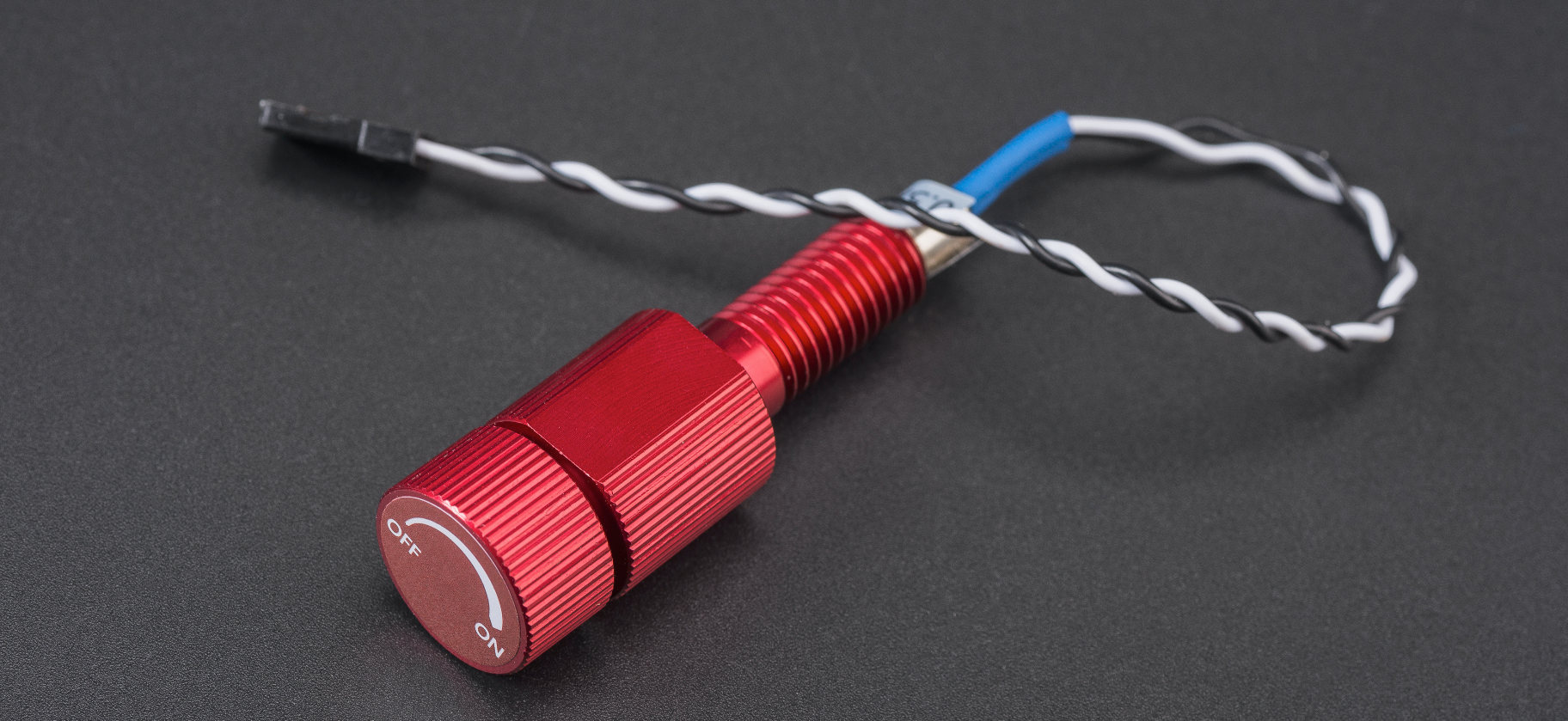
Cable penetrators can be a depth sensor(ms5837) or a switch, all penetrators are all the same size, so we can easily place different output or sensor.
underwater switch:
subsea connector:
the connector we use can work under 1000m depth.We have various kind of connectors for different equipments,made in china and ready for sale.
This connector connect battery or onboard power and buoyancy cable for communicate.
Vacuum plug for test watertight enclosure for proper seal:
for example:
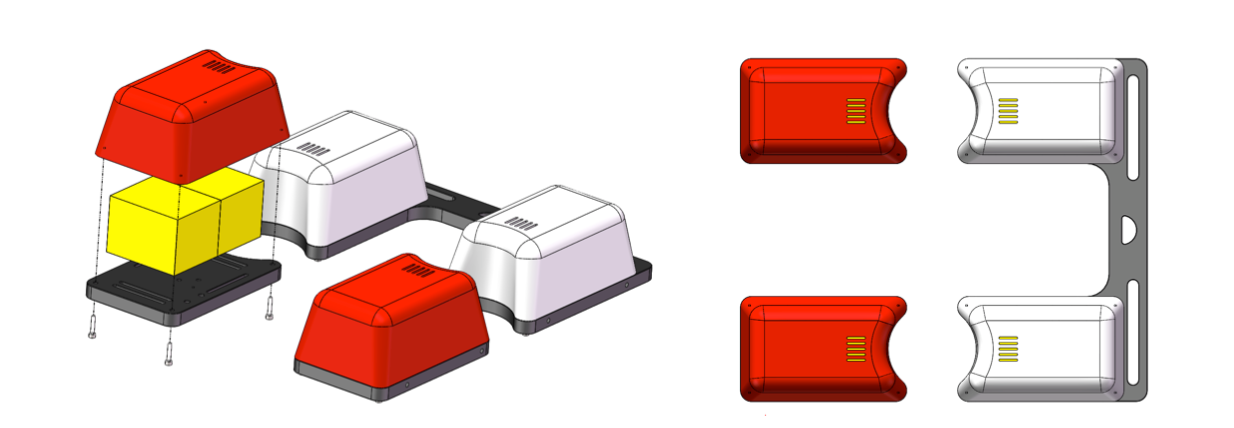
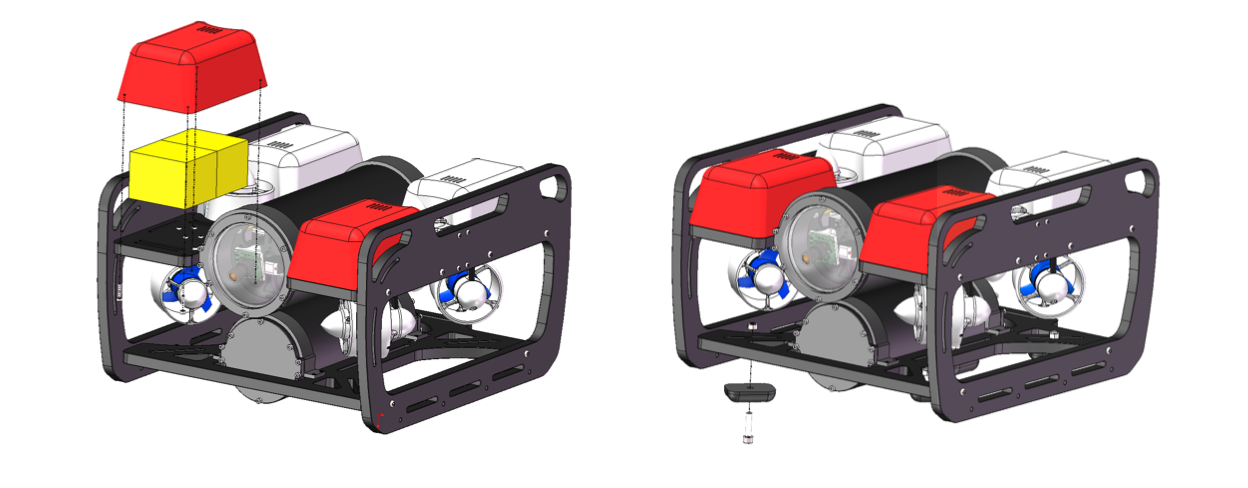
It's customized professional solid buoyancy material, 6.5Mpa ,300m depth in water, 250kg/m3. This solid buoyancy material is usually used in Marine engineering equipment.
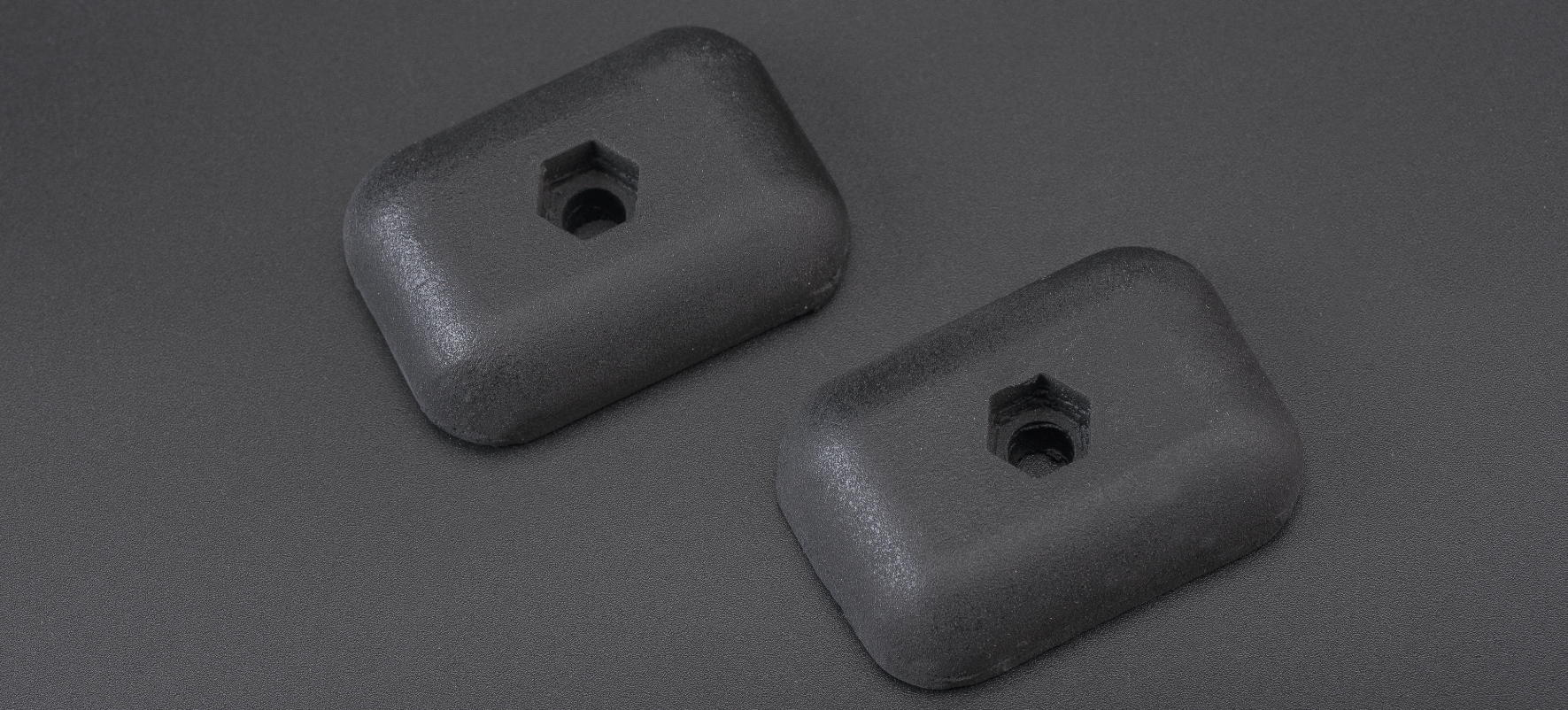
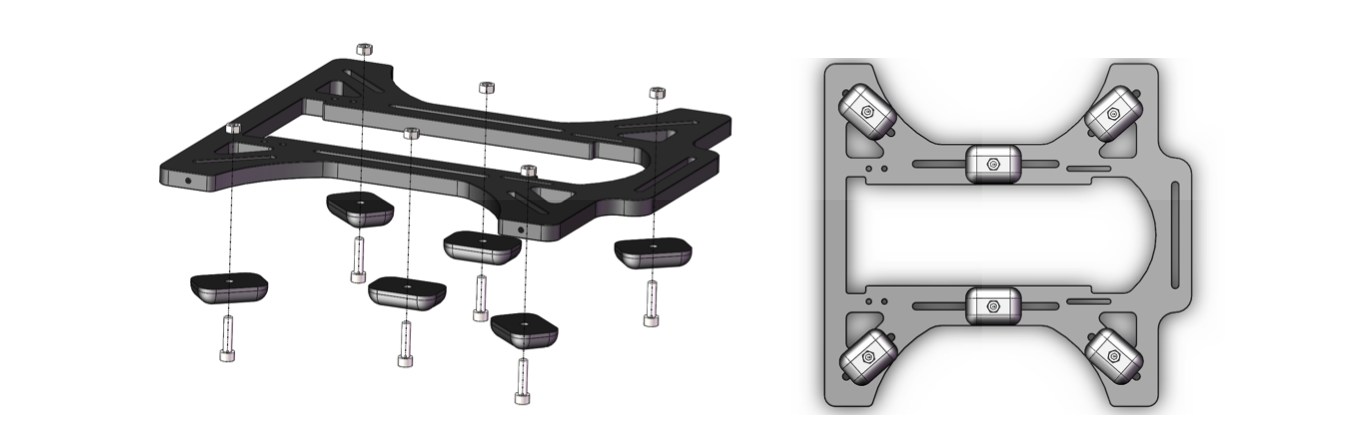
The weights are lead materials, 200g each.
The weights are mounted at the bottom, the frame has some slots to adjust the position and quantity.
Counter weight number and installation position according to the actual buoyancy situation, eventually make the ROV in the water is less than a centimeter leak out of the water, at this point the ROV has a slight positive buoyancy (close to zero buoyancy).
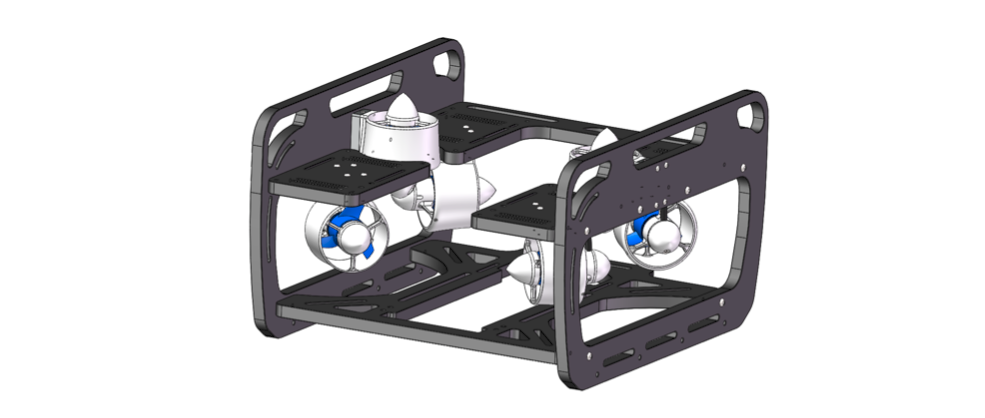
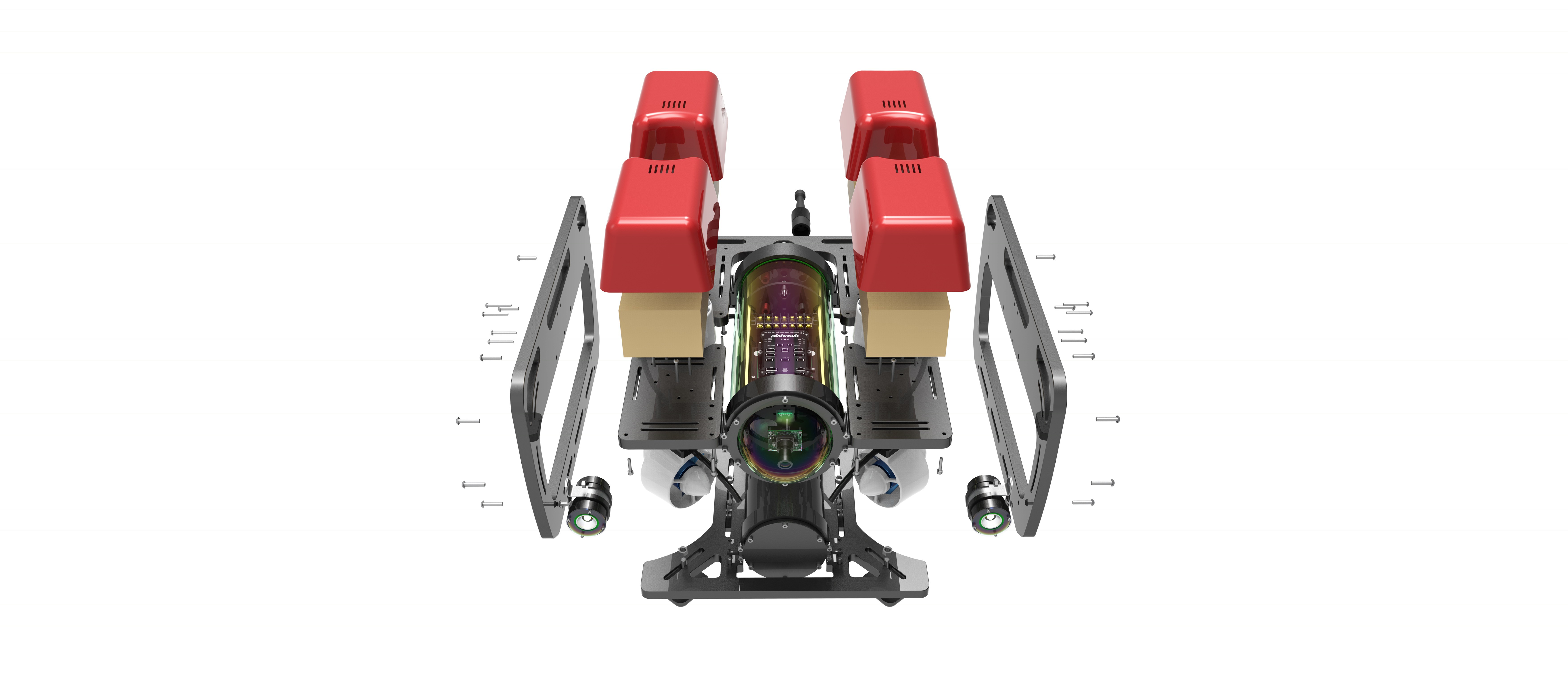
Next, mount the propeller to the frame and install watertight enclosure.
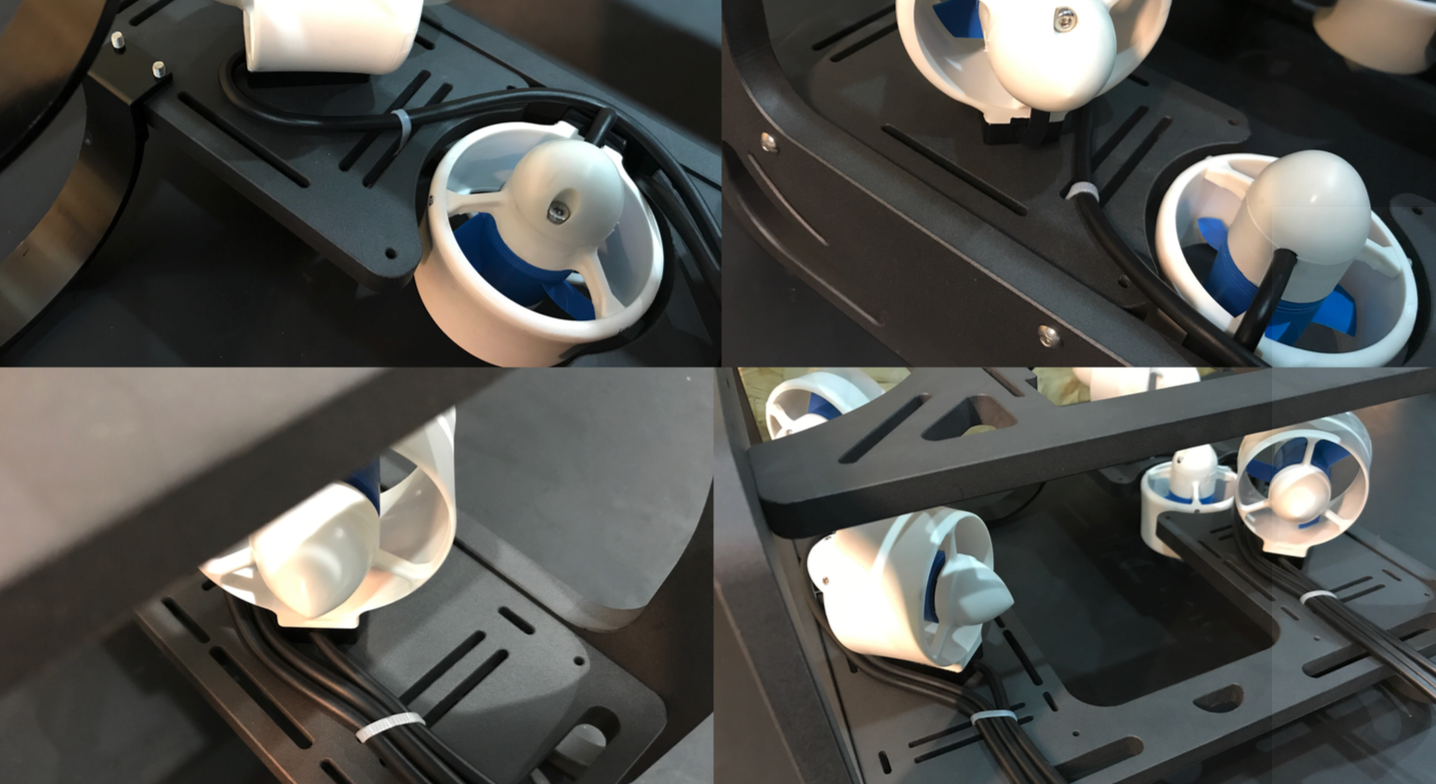
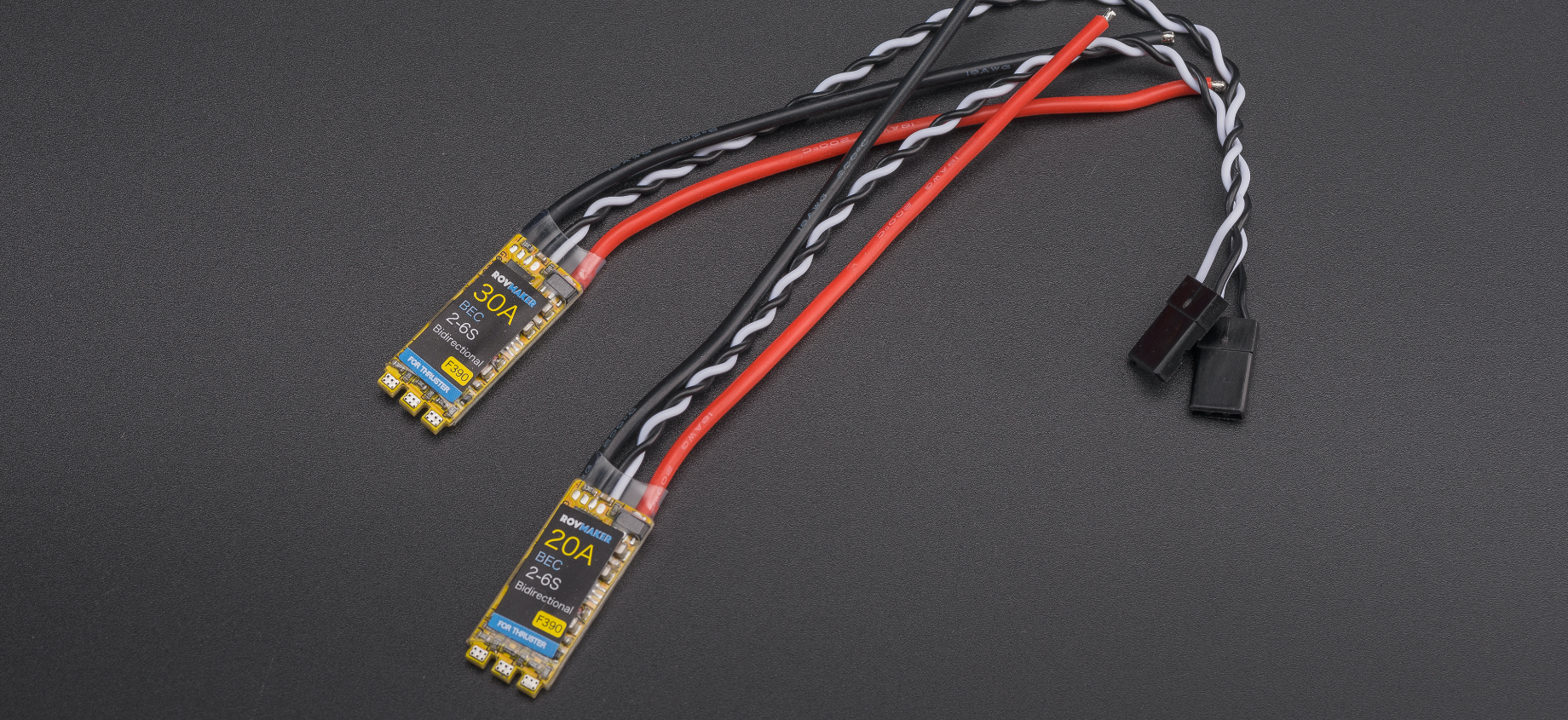
The thruster has built-in 30A ESC, which is fixed on frame and motor shell.
Then use the bandage to secure the cable, there are already installed slots on the frame.
Also, the lights are fixed on the side slots.
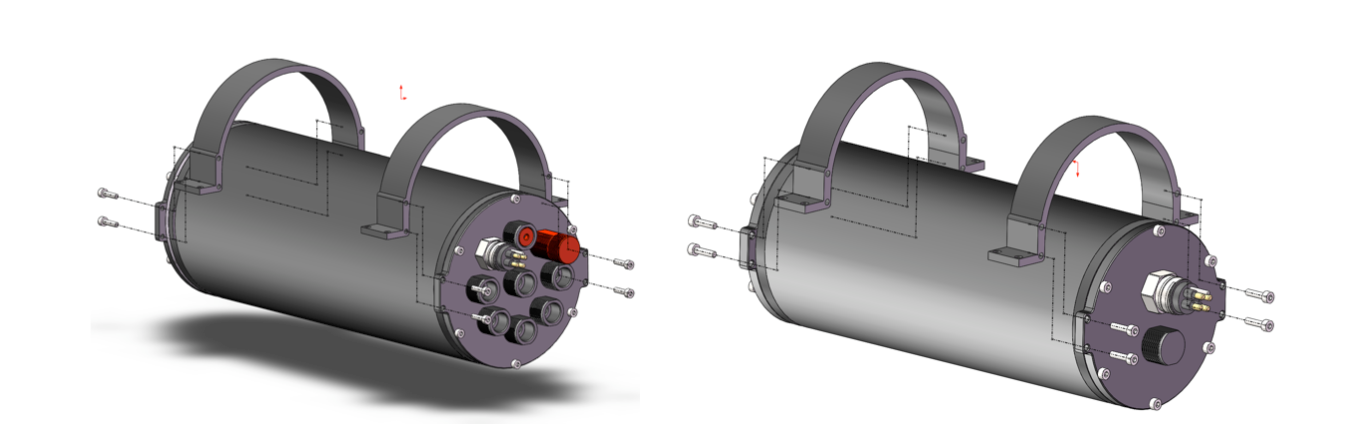
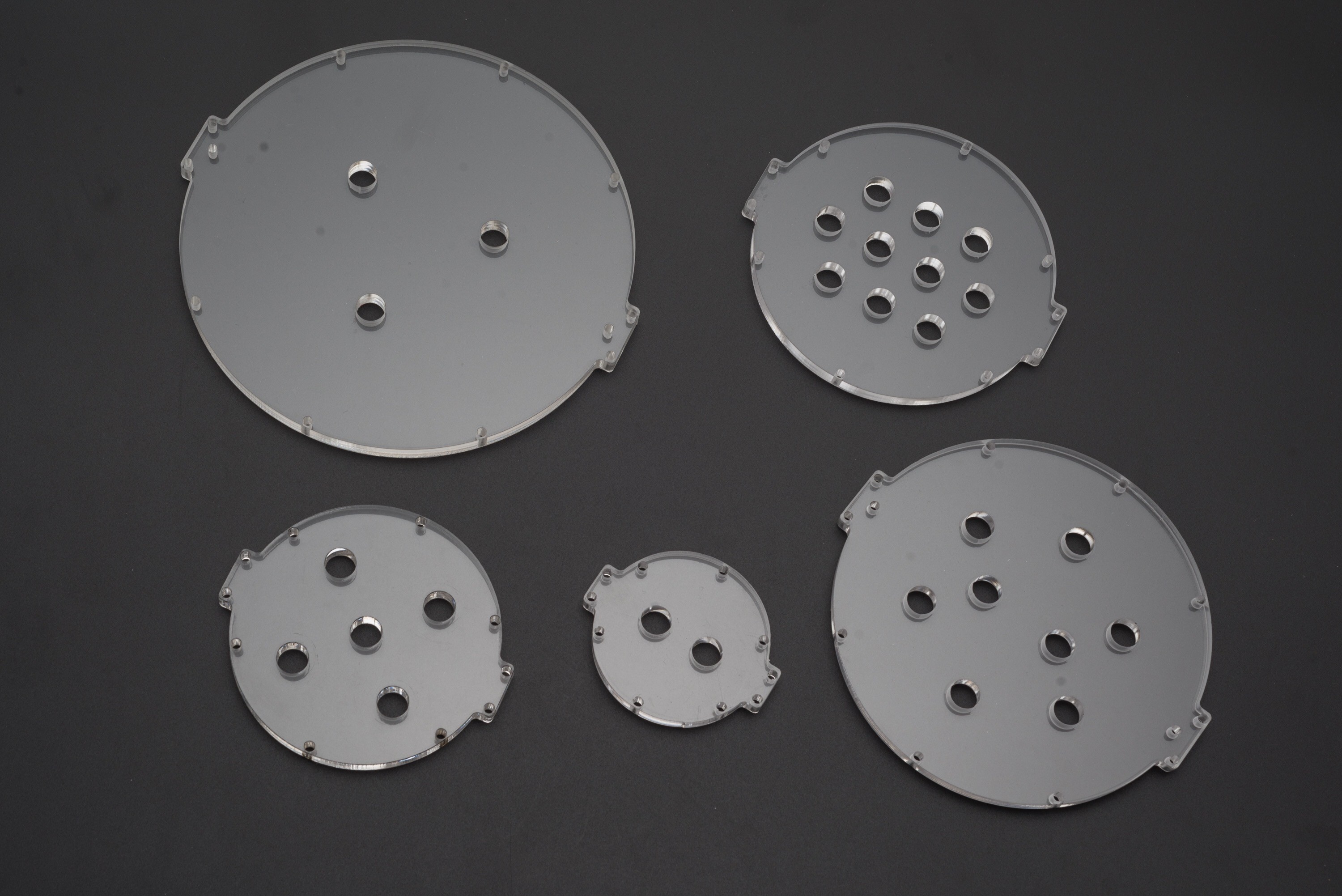
In order to ensure the pressure resistance, the watertight enclosure is all made of aluminum and the camera cover is 5 mm thick.
There are 9 output holes in the electronic enclosure and 2 in the power enclosure.
Then install the aluminum mounting.
The enclosure is mounted to the frame with a fixed position in the front, and the end is a sliding slot.
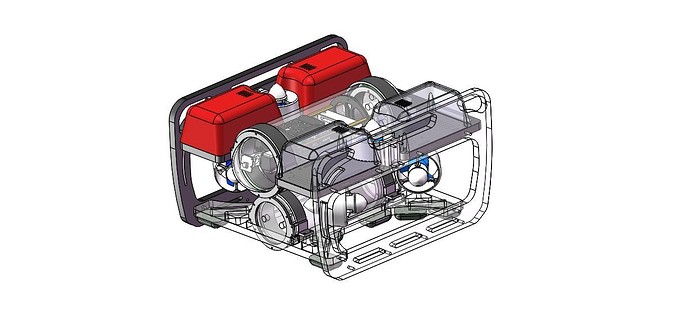
3d rendering:
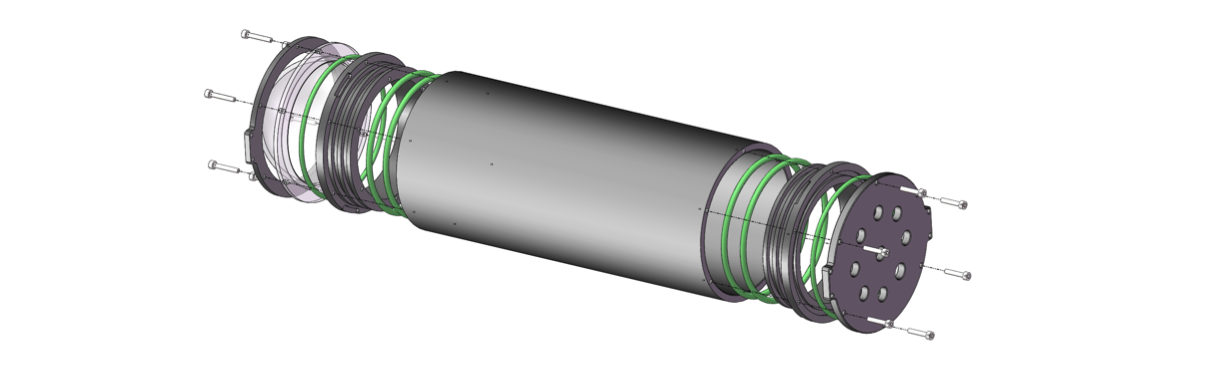
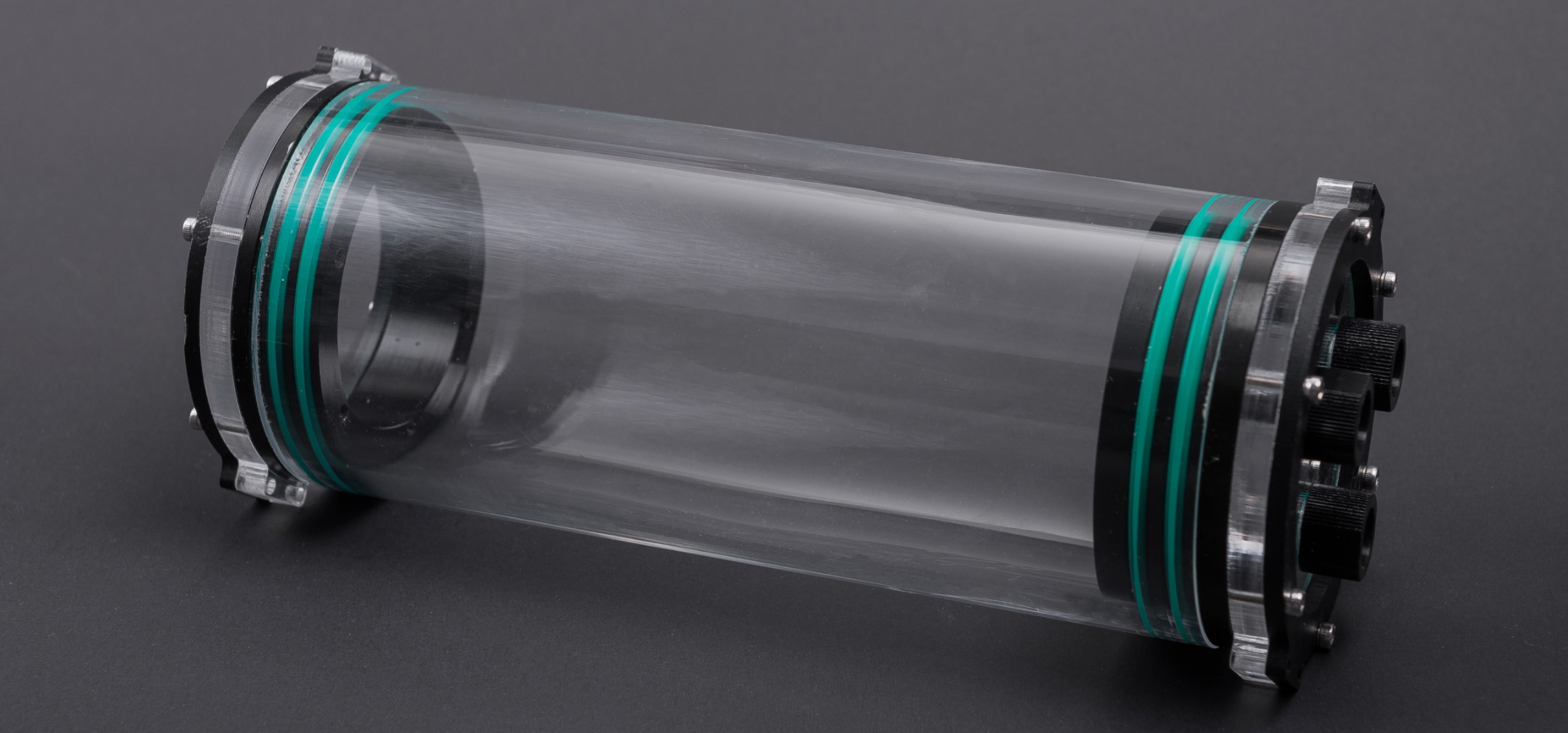
Watertight Enclosure
The watertight of underwater robots is very important. Tube and watertight enclosure are made of CNC aluminum.
screws on the tube:
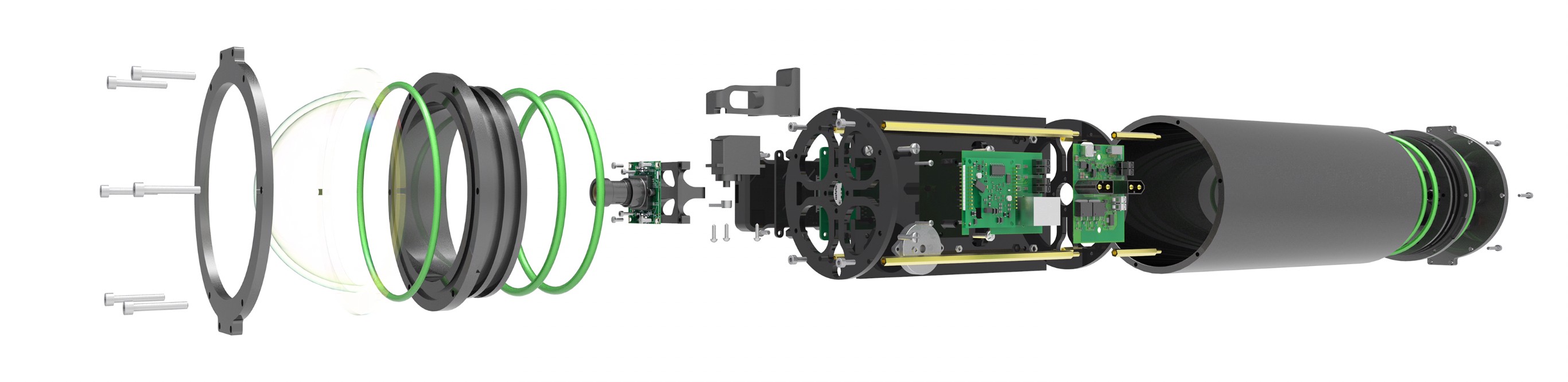
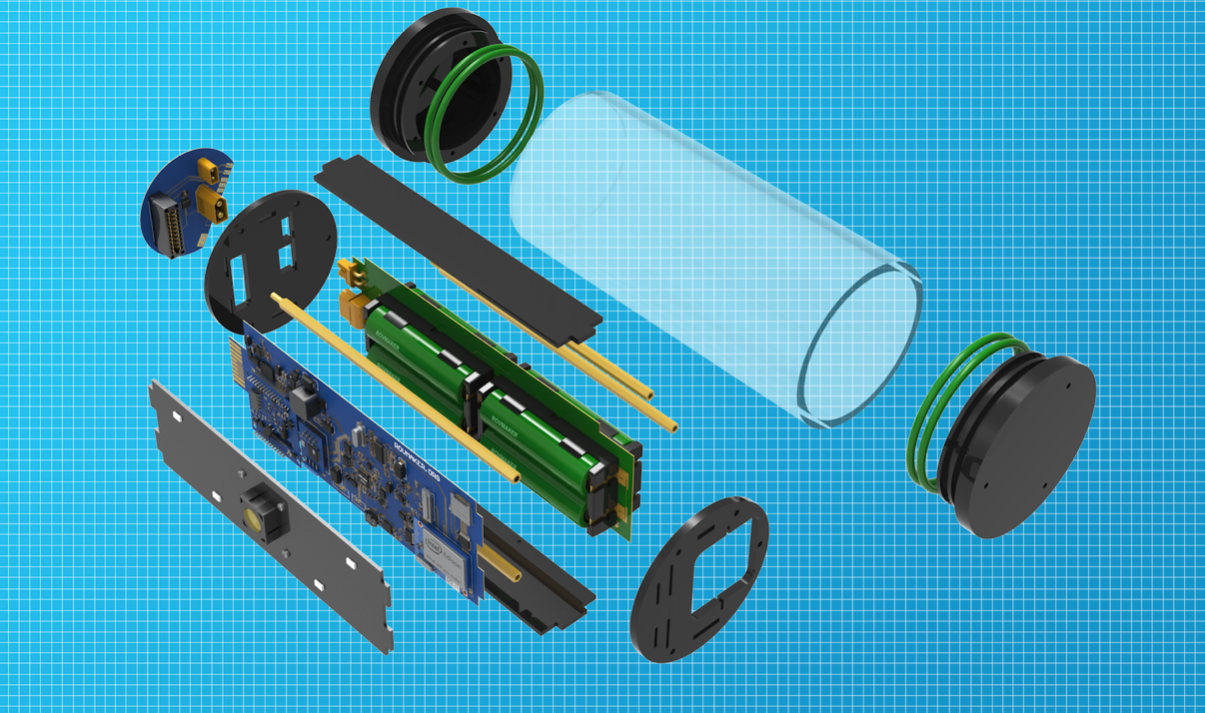
3d rendering:
The enclosure is traditional seal structure, it's easy to arrange the internal components. Edge has two enclosure, one for battery the other for electronic.
SIZE: (Outer diameter x length ) 110x250 and 90x200mm.
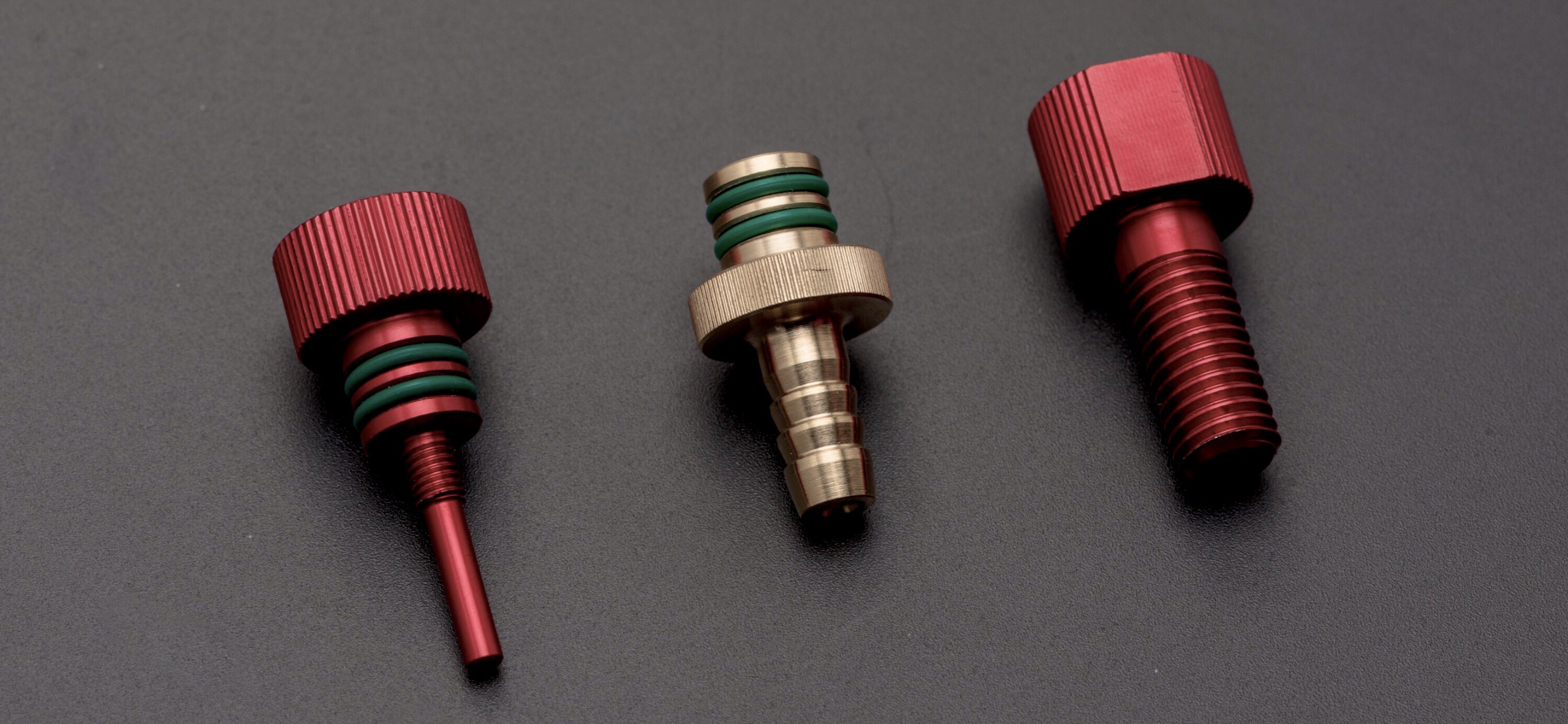
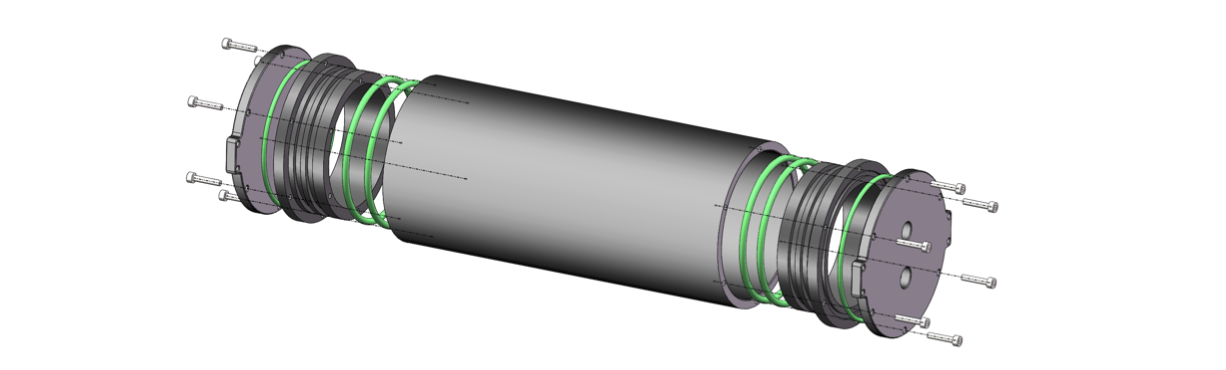
Cable Penetrator:
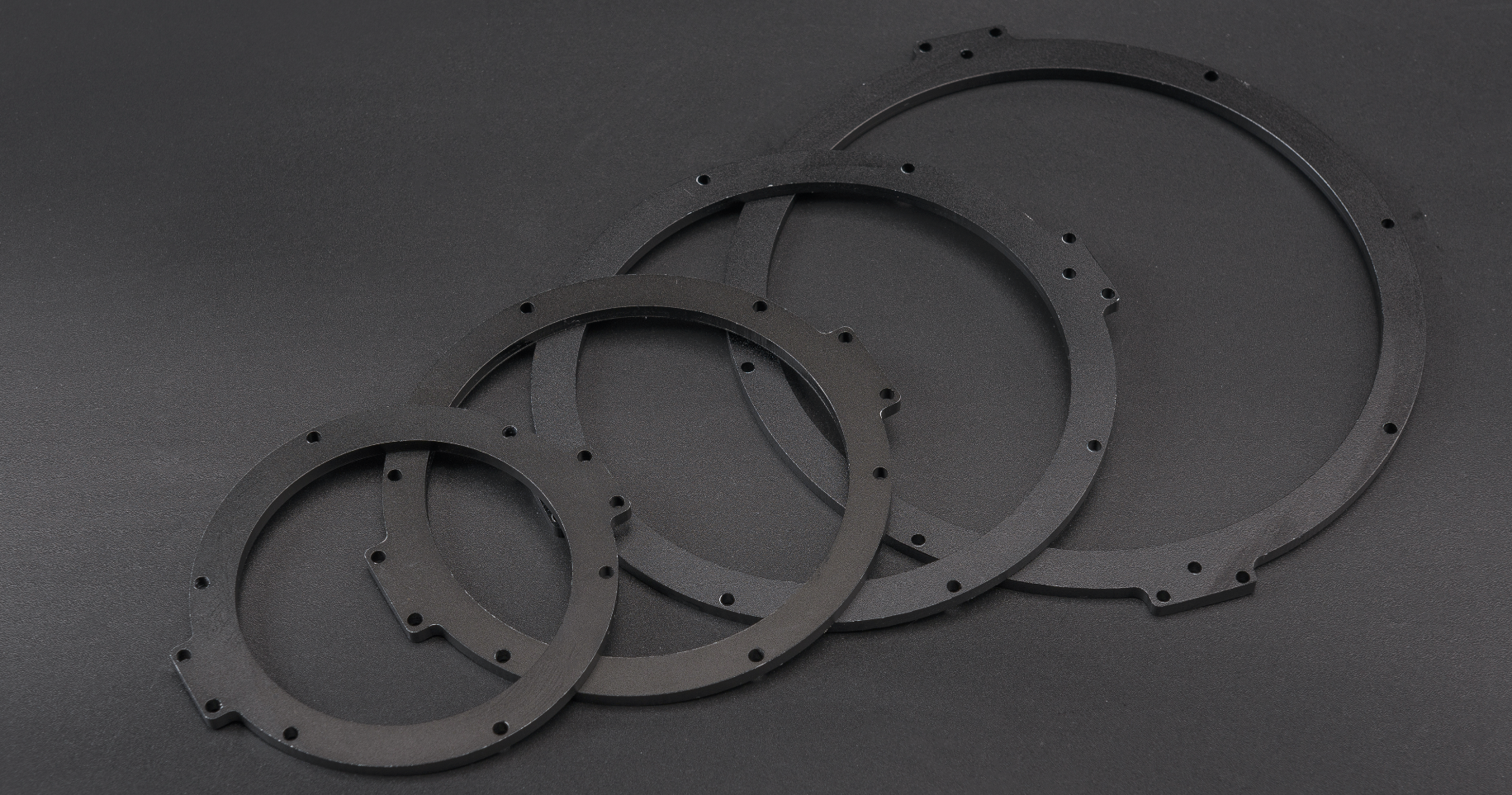
Ring for acrylic end cup:
Series o-ring flanges:
We also make series type of tube, one of them are in the picture.
some end cap:
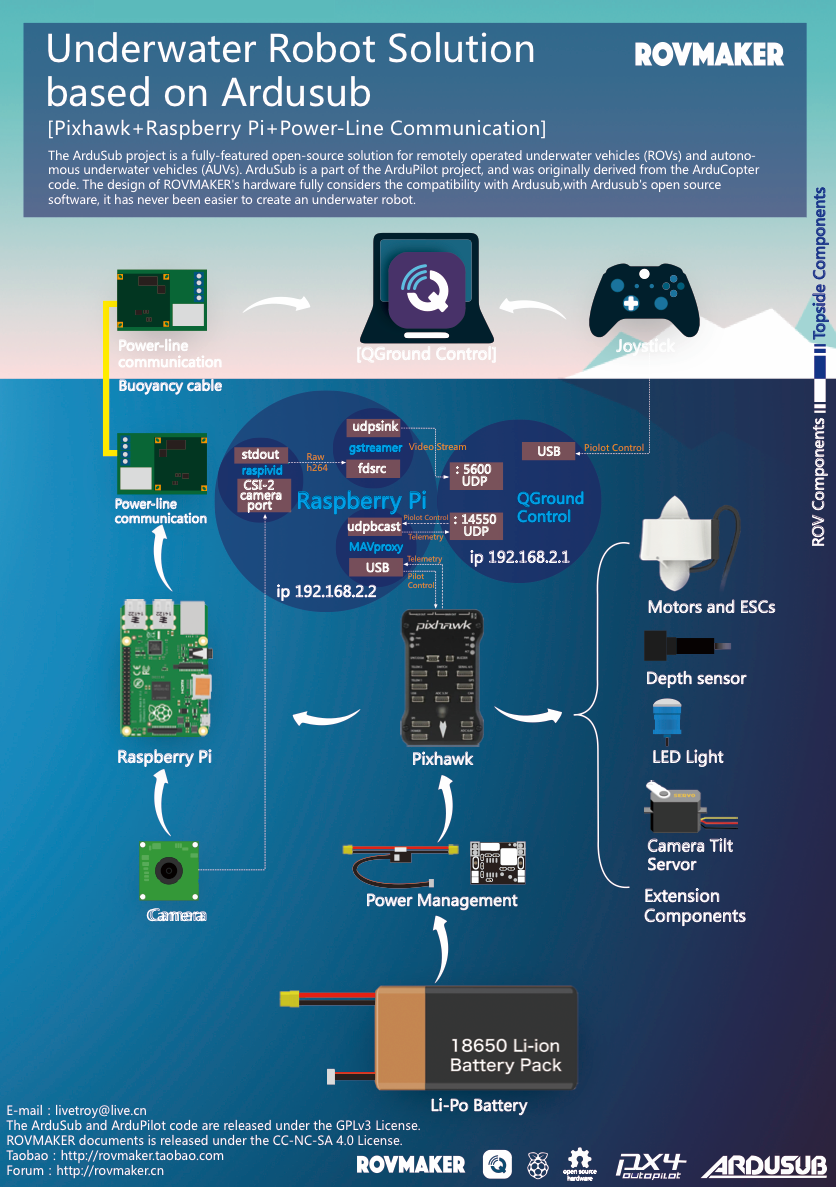
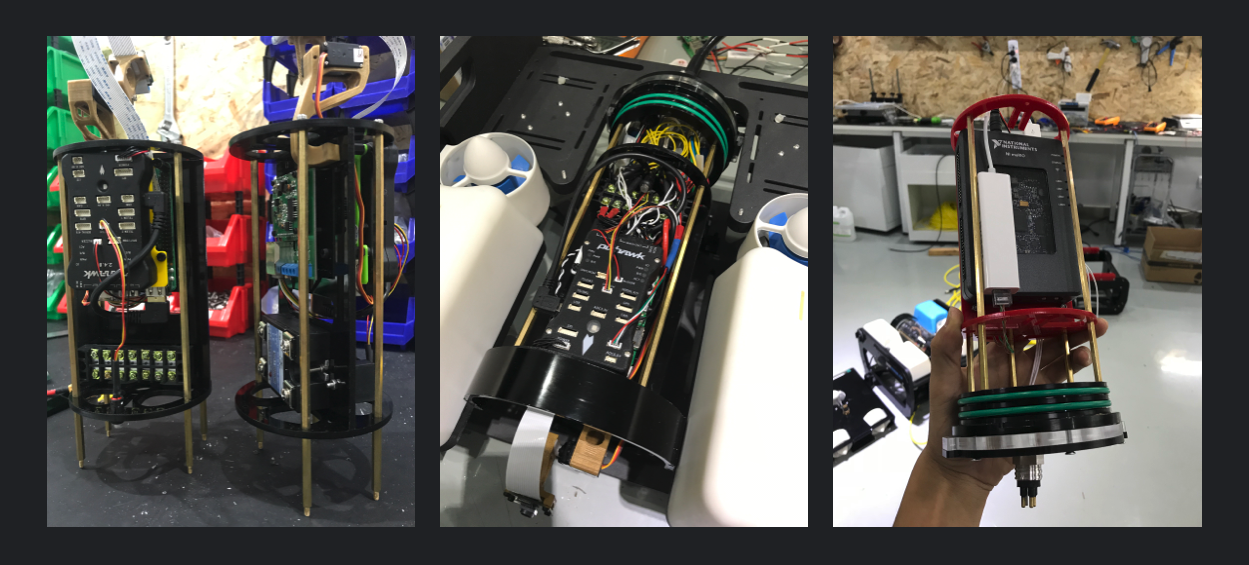
The Raspberry pi and pixhawk can be easily put in. We built an NI myRIO edition and an Intel Edison edition.
looks like this:
This image is the layout of another ROV we built.
Dom end cap:
enclosure clamp:
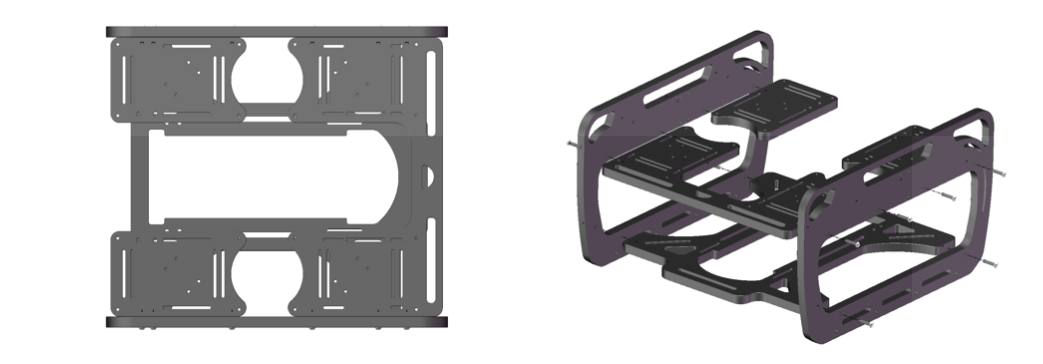
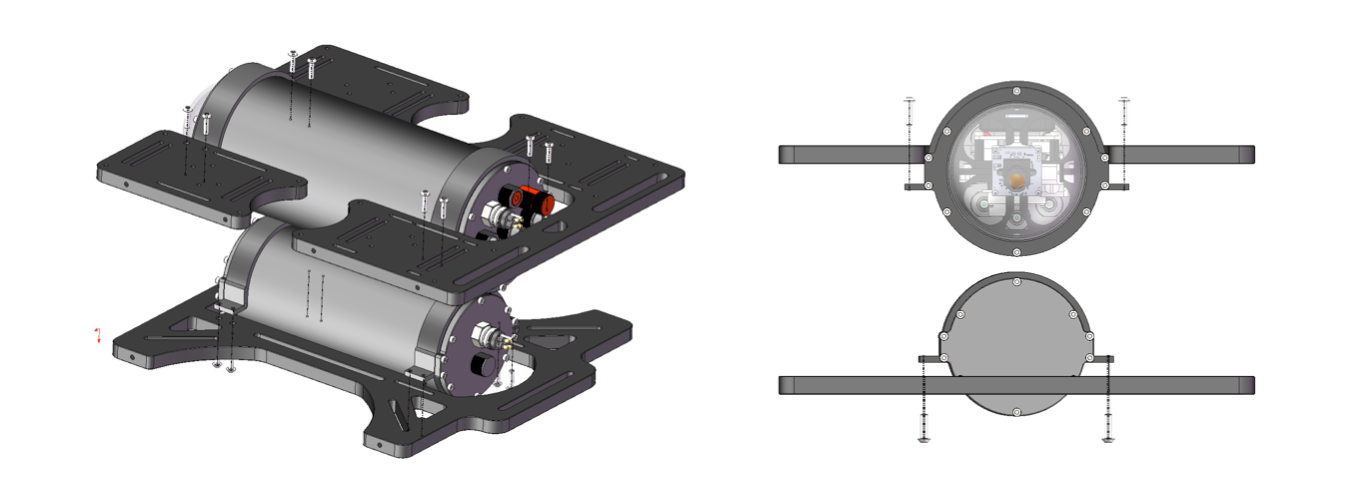
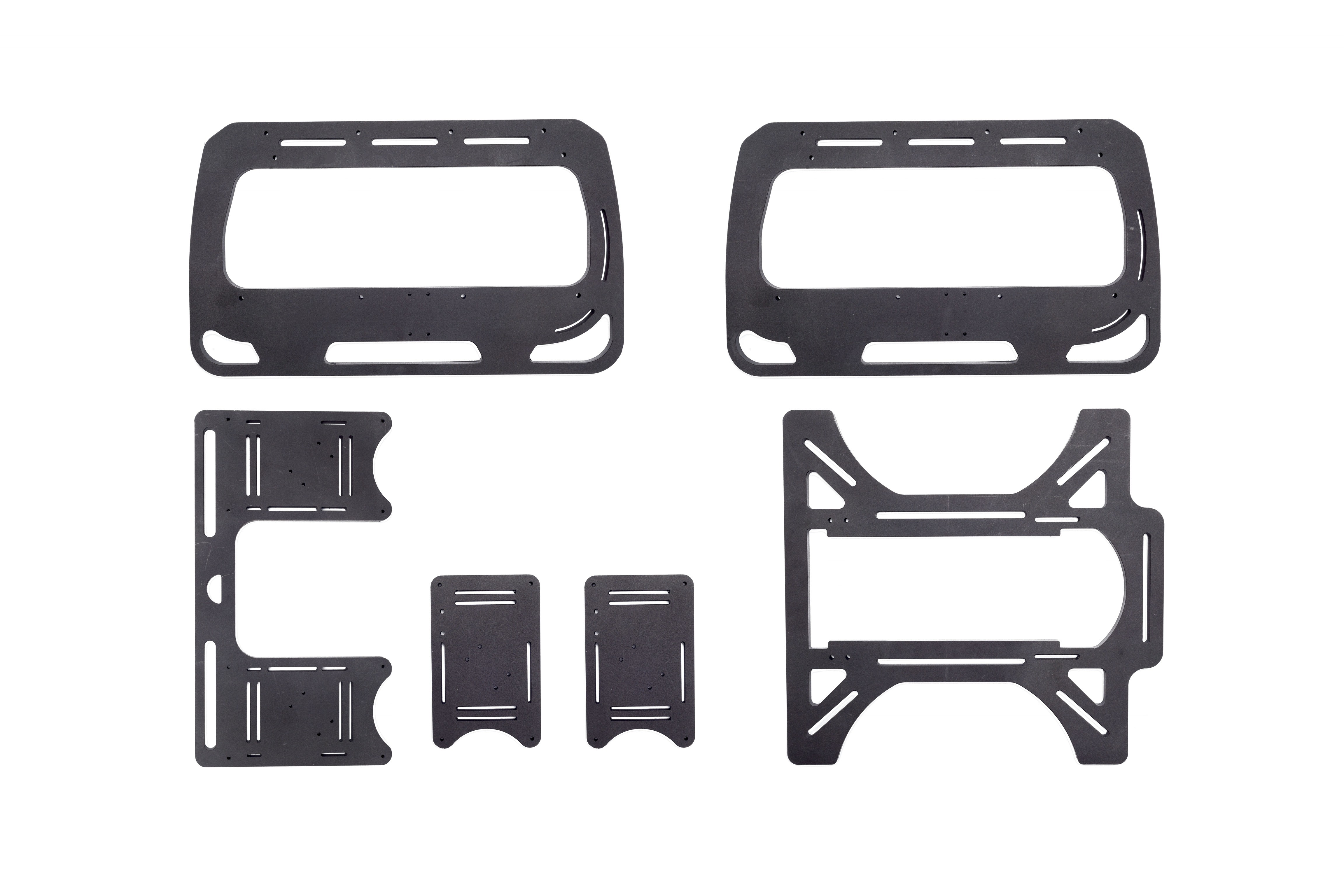
HDPE Frame
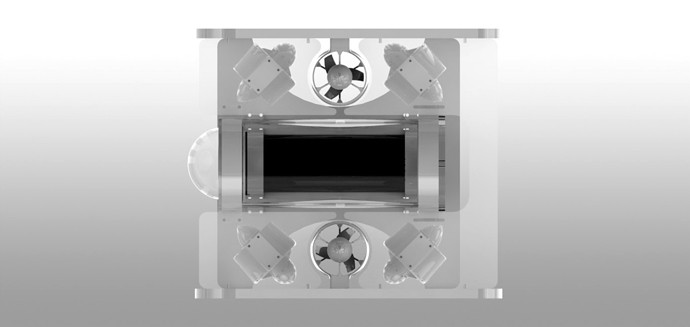
After confirm the thruster's layout -- six thruster , vector arrangement , two for vertical ,four for plane , the overall structure is more obvious. The whole size is about 430x390x220mm.
Frame includes 4 CNC parts to install watertight enclosure.
The thickness of the plate is 12mm, it's strong and suitable for underwater.
photos:
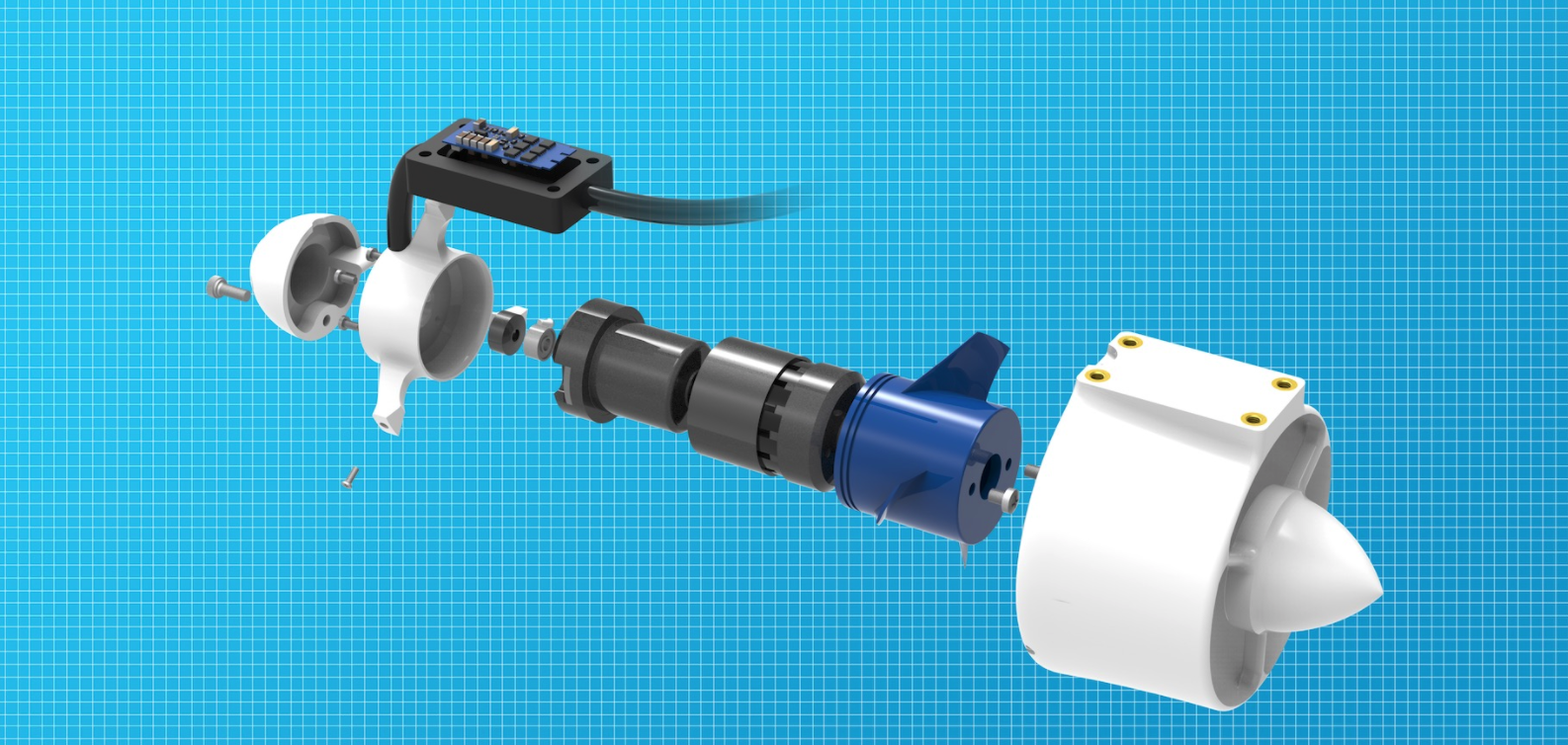
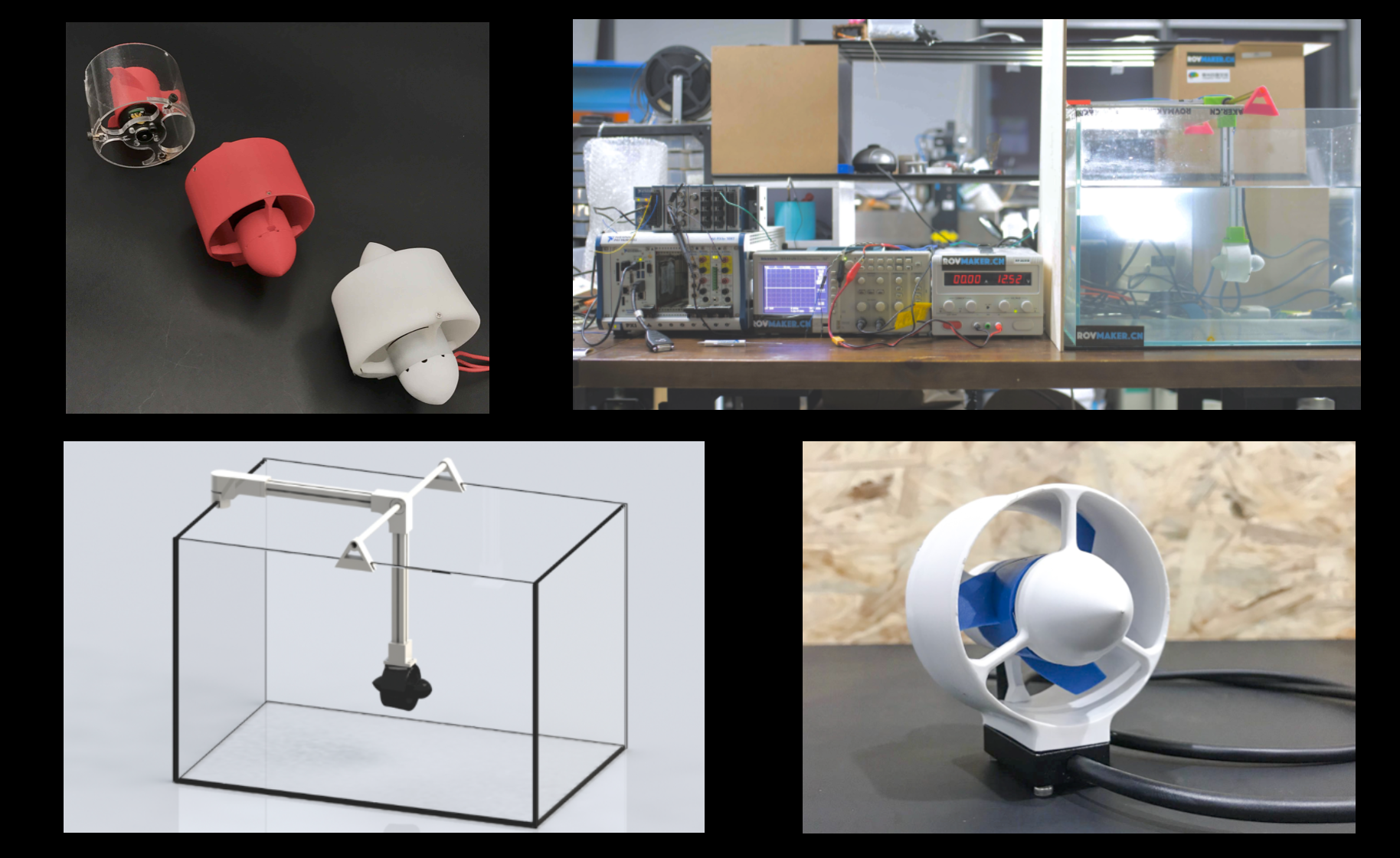
Design and produce thruster first
It's always the first to design the thruster. We all know the ordinary RC brushless motor can operate underwater, but once you get into seawater, there will be serious damage. So a special manufacturing processes are designed to protect all parts of motor. However, it is a regular process to clean with water after launching, everybody should do with seawater used equipment.
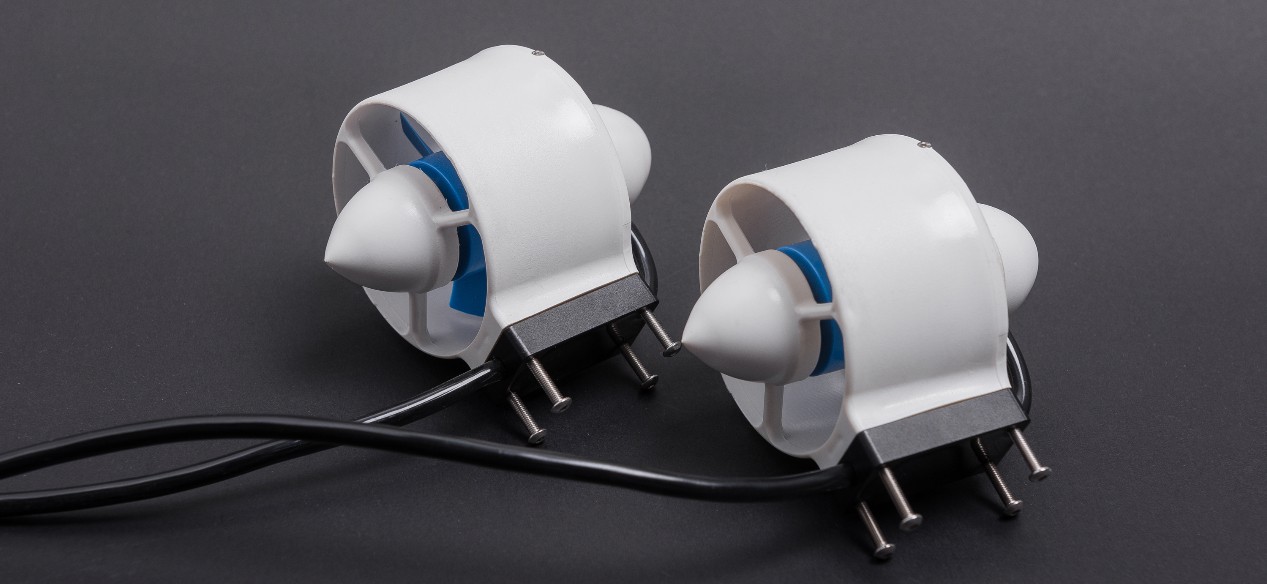
Thruster are completely protected, and we've already brought the thruster into mess production. Esc is located in part of the aluminum part of the installation, and sealed by resin, which can quickly dissipate heat.
2kg power, 350kv, 30a ESC, 12N/14P, 5600rpm,3s-6s, 10A max .
We used NI PXI to build a test platform.The ESC in thruster:


Hello,
From where could I get these cable penetrators and buoyancy material?

Hi, you can send me email ,we have online store in China for now.

I've visited your taobao store but unfortunately it only seems to be available in chinese. Is there an english version available? Cheers
What's new compare to this project ? You used their 3D ?
https://www.bluerobotics.com/
Bluerov and this both used ardusub, and all the other are completely different.
This kind of typical structure looks similar, but all the components are not same.
Well, it seems very similar to me! Except for the color of the foam covers, I don't seen the difference!




















 Tim Wilkinson
Tim Wilkinson
 Sam Ferguson
Sam Ferguson
 Sean Morton
Sean Morton
 Maximiliano Palay
Maximiliano Palay
Hello, is this project still active in 2021 ? Can you please inform us if that is OpenSource ?