 Bud Bennett
Bud BennettI had a problem with an Chinese clone of an Omnibus F4 Pro Corner flight controller. I connected the smart port inverter to VDD=5V and found that the gyro noise was so high that I had to set moron_threshold = 0 to get the quad to arm. Any value larger that zero for moron_threshold would not allow the quad to arm consistently. It was not obvious what the problem was until I cut the smart port inverter out of the system and the gyro noise disappeared. Q.E.D.
I was suspicious, however, and measured the voltage on the the UART6 TX/RX pins at 3.3V, even though the inverter was connected to 5V. I decided to reconfigure the smart port inverter to operated at VDD=3.3V. The solution was to replace the 2N7002 MOSFET with a MOSFET having a lower threshold voltage that allowed operation at 3.3V. I did not trust the 2N7002 to switch properly when using a 3.3V supply because it has a large specified maximum threshold voltage of 3V, which is pretty close to VDD.
I decided to substitute a 2SK3018 MOSFET for the 2N7002. The 2SK3018 has a max VTH of 1.5V, which is better suited to the lower VDD value. Unfortunately, the 2SK3018 is an obsolete part, but still available from eBay sources. Alternatively, the DMN65D8L MOSFET has a threshold between 1.2V and 2.0V and is probably still active. There are probably other MOSFETs that will work at the lower VDD if the max. threshold is below 2.0V
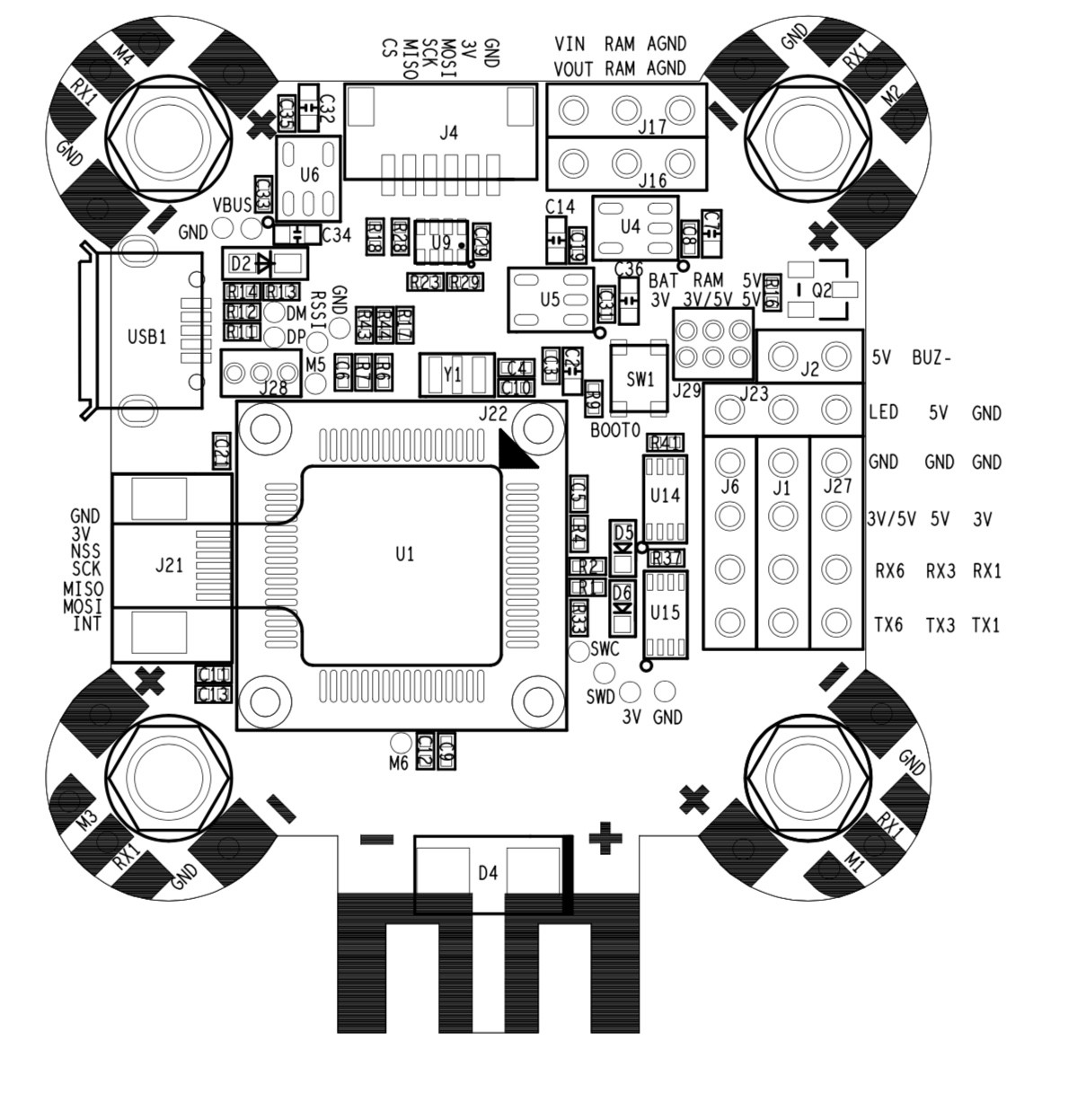
I changed the VDD supply for the smartport inverter to 3.3V by configuring the Corner flight controller to provide 3.3V on the 3V/5V pin via the jumper adjacent to the j2 pads:
After I made the changes to VDD the telemetry worked again and the gyro noise disappeared, so now moron_threshold = 32, the default value, and the quad arms without any issues.
Conclusion:
I suggest that going forward that a lower threshold MOSFET like the 2SK3018 should be substituted for the 2N7002. This should allow operation at VDD=3.3V and VDD=5V. Be careful to match the VDD of the smart port inverter to the VDD used by the UART that it is connected to.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
Yes 2N7002AQ-7 is what i got from arrow and that's what on my pcb's without knowing that they would work on 3.3v :) .I just picked up 2N7002AQ-7 randomly from arrow :)
But i actually meant using this dual channel SOT23-6 package DMN65D8LDW-7 by designing new pcb so that we use just one diode and resistors on one side of PCB.I only use CAD software but never used PCB designing software,so don't know how to make those changes.
Are you sure? yes | no
Hmmm...dunno. My limited experience with PCB layout leads me to say “probably not” and “it depends”. Having a single package for 2 components seems like a good idea, but in practice having to wire all of the connections to one package instead of two not-much-larger packages tends to make the layout larger (it’s like putting shoes in a suitcase — separate shoes are easier to find space than both shoes in one bag.) Additionally, the SOT23-6 has an even number of pins so it is easier to place the package rotated 180° if you’re not careful — this doesn’t happen with odd-numbered pincount packages. I could give it a try, but won’t build any of them myself since I already have more of these PCBs that I’ll ever need. I can’t guarantee anything...buyer beware.
Are you sure? yes | no
Thanks.Yes that is your valid point.One can place the package in wrong orientation.
Are you sure? yes | no
Hi Bud,Thanks for the update.
I found DMN65D8LDW-7 which has a Gate Threshold Voltage between 1v to 2v and its dual N-CHANNEL,so we can use only 1 diode.Its in stock at arrow.com.Do you think it can be used to save space by placing components just on one side of the PCB?
Are you sure? yes | no
No. The DMN65D8LDW-7 uses a SOT23-6 package -- it won't fit the pads on the PCB.
I found the 2N7002AQ-7 for only $0.18/each on the arrow site. This part is a lower threshold version of the ubiquitous 2N7002, with 1.2V < Vth < 2.0V. Check out its data sheet. I would go with that part.
Are you sure? yes | no