 Nestore 78
Nestore 78Halllo,
this is a easy solution for feed two lovely cat's, in early morning. (04:00am)
At the moment I have only one difficult to find the right way on Arduino programming (becasue i'm a novell of this system and C/C++ language). I need support to generate connection between RTC DC3231i2c, with0 real time clock already on display 20*4 i2c, and generate a comand for move two different servo in same time but in different way (the 1th from 0° to 180° the 2th from 180° to 0°).
In the future i'll implemented one botton for manual dispensing mode.
This is not solution for long time feed fod cats alone!!
I'll use two little bottles for the dry food and with spiral cap on the to of bottles on 30/45° of longitudinal inclination, with use of two servo I'll rotate the bottles and dispensing the food (I don't know if on a tubing for the bowl or directly to the bowl).
Best regards, and thanks a lot for your programming support.


 theschlem
theschlem
 ProgressTH
ProgressTH
 fullyanalog-programmer
fullyanalog-programmer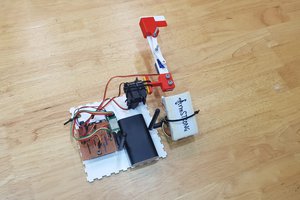
 Juin Lee
Juin Lee
This is a error messages:
Primo_test_RCT_LCD_SERVO2:67: error: 'servo1' does not name a type
servo1.attach(7); // attaches the servo on pin 9 to the servo object
^
Primo_test_RCT_LCD_SERVO2:68: error: 'servo2' does not name a type
servo2.attach(8);
^
Primo_test_RCT_LCD_SERVO2:72: error: 'Serial' does not name a type
Serial.println(time);
^
Primo_test_RCT_LCD_SERVO2:74: error: expected unqualified-id before 'if'
if (time == "04:00:00") {
^
Primo_test_RCT_LCD_SERVO2:80: error: expected unqualified-id before 'for'
for (pos = 0; pos <= 180; pos += 1) { // goes from 0 degrees to 180 degrees
^
Primo_test_RCT_LCD_SERVO2:80: error: 'pos' does not name a type
for (pos = 0; pos <= 180; pos += 1) { // goes from 0 degrees to 180 degrees
^
Primo_test_RCT_LCD_SERVO2:80: error: 'pos' does not name a type
for (pos = 0; pos <= 180; pos += 1) { // goes from 0 degrees to 180 degrees
^
Primo_test_RCT_LCD_SERVO2:86: error: expected unqualified-id before 'for'
for (pos = 180; pos >= 0; pos -= 1) { // goes from 180 degrees to 0 degrees
^
Primo_test_RCT_LCD_SERVO2:86: error: 'pos' does not name a type
for (pos = 180; pos >= 0; pos -= 1) { // goes from 180 degrees to 0 degrees
^
Primo_test_RCT_LCD_SERVO2:86: error: 'pos' does not name a type
for (pos = 180; pos >= 0; pos -= 1) { // goes from 180 degrees to 0 degrees
^
exit status 1
'servo1' does not name a type