0%
0%
Moving Head Projector Conversion
The goal of this project is to convert a regular pan & tilt moving head into a fully open source moving head projector!
 Thomas
ThomasBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests

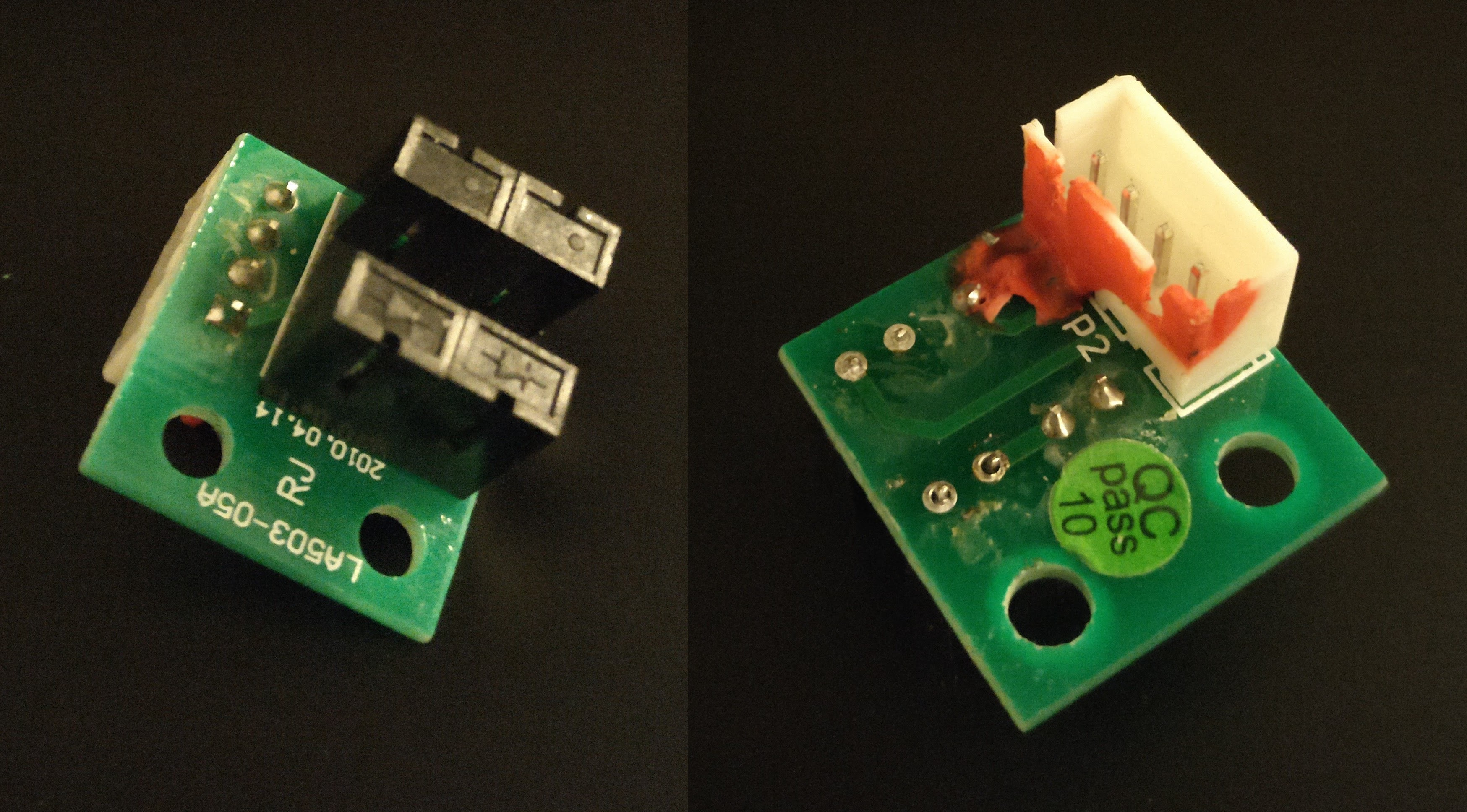
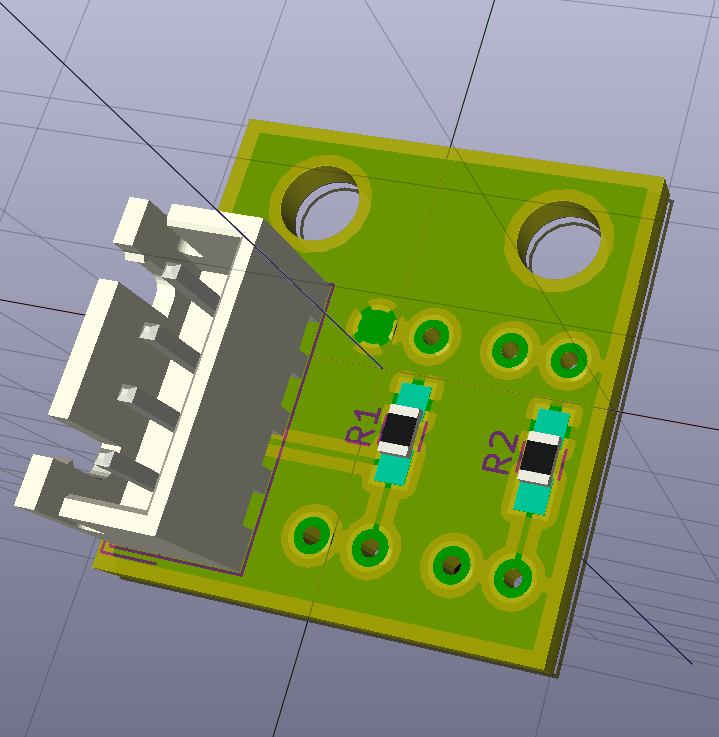
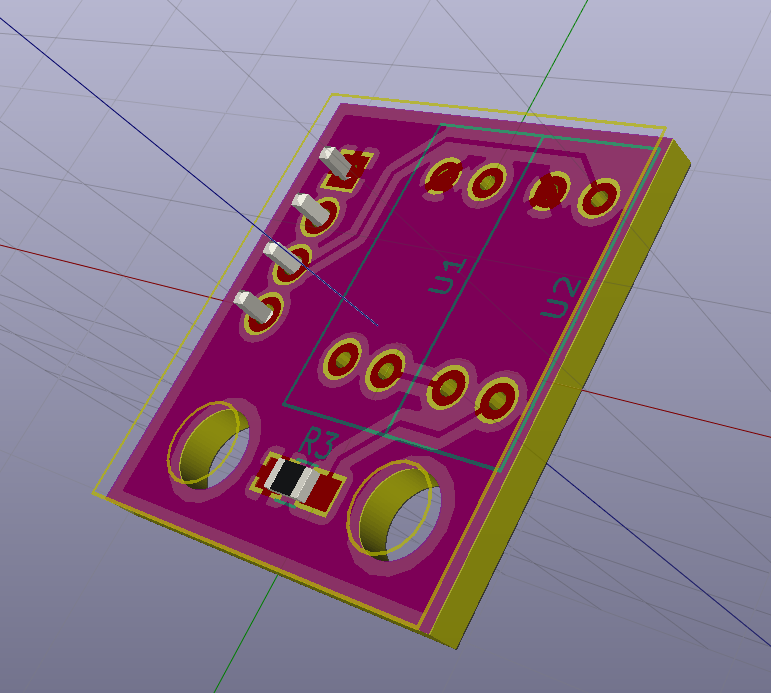
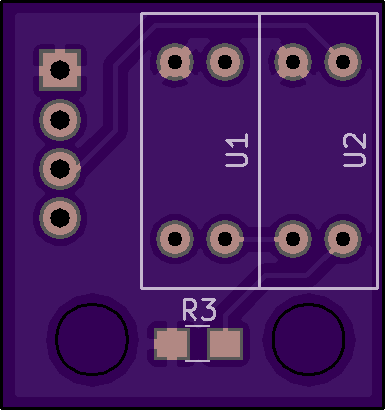
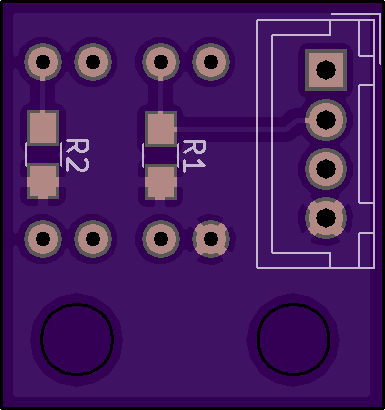
 It is very similar to what you would find in a 3D printer. It features five stepper motor drivers, three endstop inputs, two encoder inputs, one DMX input, one 4-character 7-segment display output, two MOSFET outputs for powering the light source and fan and two power inputs. It's all controlled by a small 12MHz MCU. There's also one (unused) SPI header. The backside is scattered with tiny surface mount passives. Nothing too surprising here.
It is very similar to what you would find in a 3D printer. It features five stepper motor drivers, three endstop inputs, two encoder inputs, one DMX input, one 4-character 7-segment display output, two MOSFET outputs for powering the light source and fan and two power inputs. It's all controlled by a small 12MHz MCU. There's also one (unused) SPI header. The backside is scattered with tiny surface mount passives. Nothing too surprising here. 



 RossGK Tangibles
RossGK Tangibles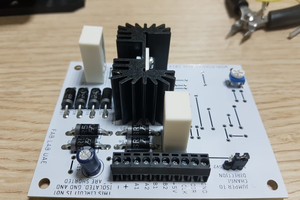
 Gabriel D'Espindula
Gabriel D'Espindula
 ottoragam
ottoragam
 David Brown
David Brown
How do you plan on accomplishing the brain of the light? I'm interested in making a moving head projector, and had planned on using PureData for the signal processing and Gem for graphic generation. https://puredata.info/downloads/gem/documentation/manual/manual/gem-introduction Gem allows you to generate graphics, both are freeware.. More recently someone suggested using ISOdora since it has built in arduino serial I/O capabilities. Excited to see more!