 TinHead
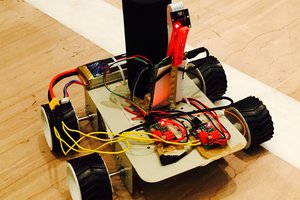
TinHeadIt is powered by a Raspberry model B, running a custom built Linux distribution.
The web interface is written in Python using the Tornado framework, and websockets for (almost) realtime control.
Video is captured from the webcam and it is displayed realtime in the web interface in order to allow FPS style control of the tank.
The webinterface is accessed trough wireless, making the control possible form almost any device featuring a modern browser.
The system is powered by 3 x 18560 3.7v Li-Ion cells connected in series.







 Dementor
Dementor
 Andy from Workshopshed
Andy from Workshopshed
Your github repo seems to be missing the top cover. And is there a battery cover to print? I can't tell how it goes together either since your tracks are installed in all three pictures. Did you describe the assembly somewhere?