 George Albercook
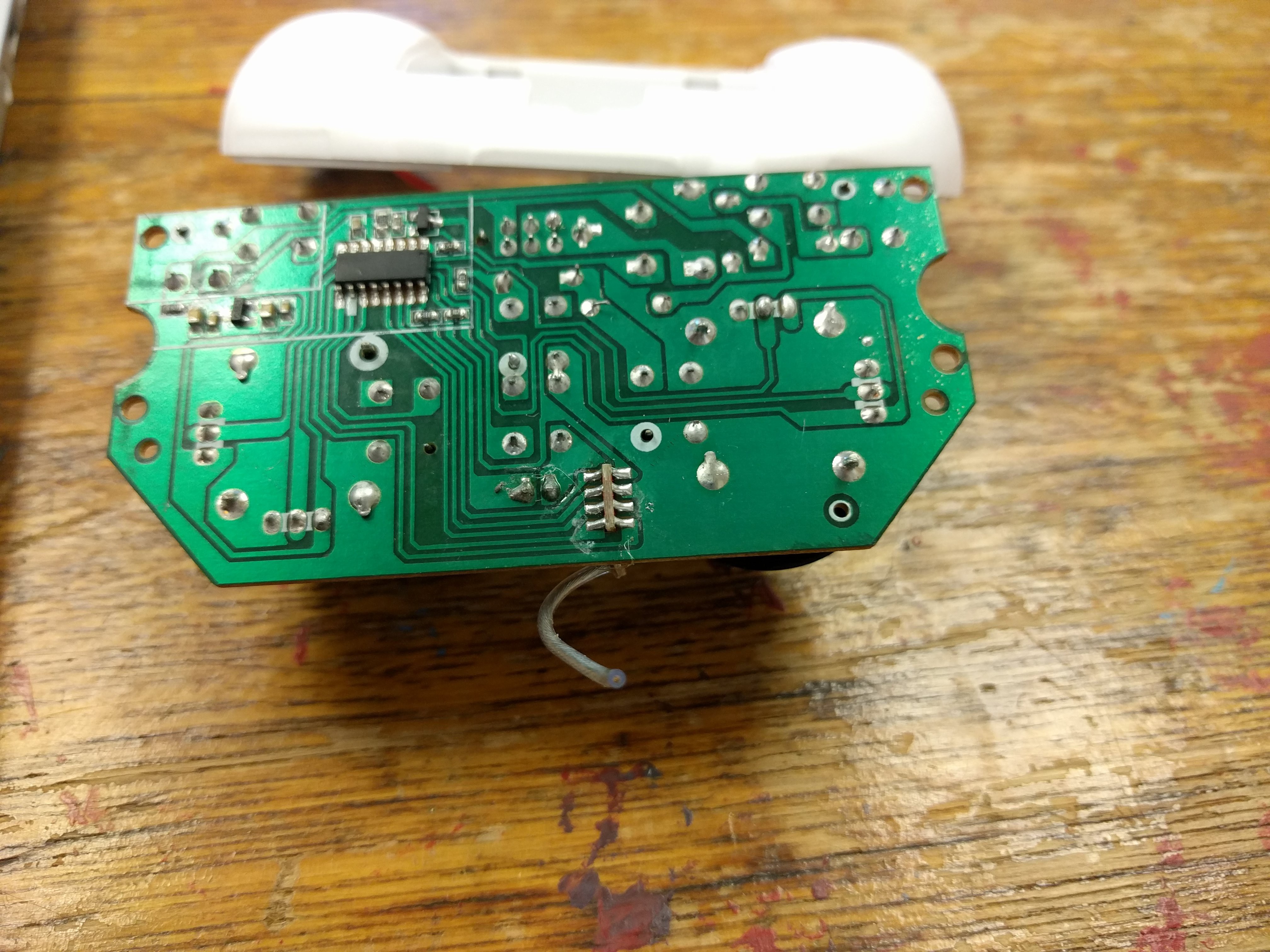
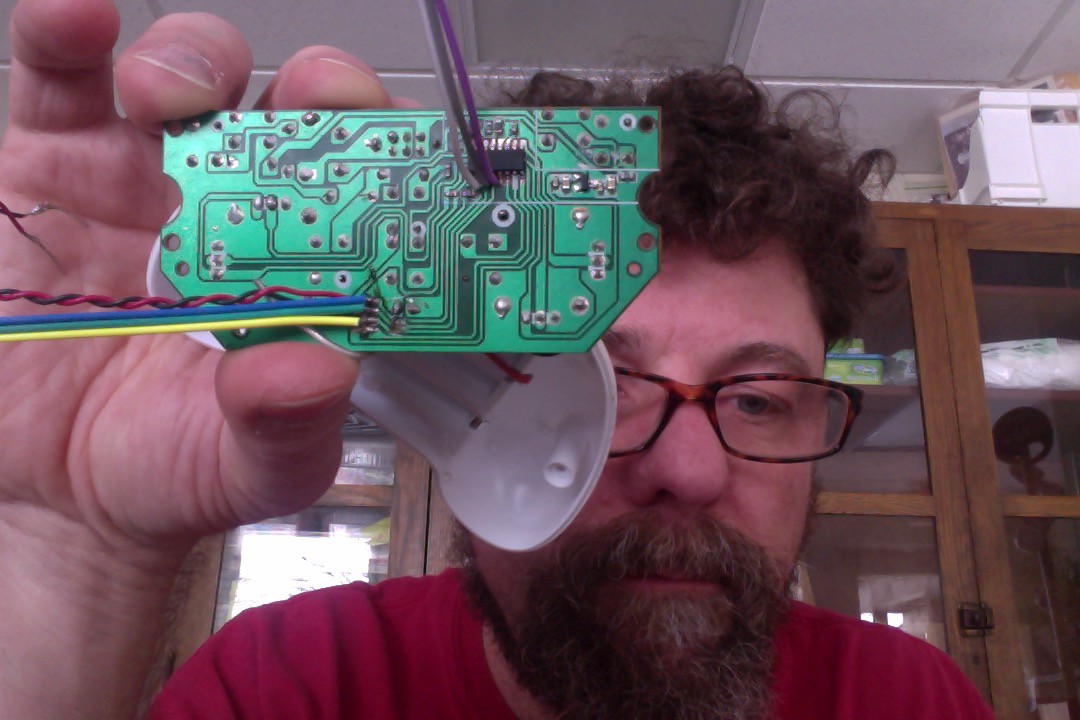
George AlbercookFirst task: Make sure that we can communicate with the microcontroller in the Eachine H8 Mini. See log entry Connecting with the microcontroller in the Eachine H8 mini. We will need to talk to it before we can change its mind and bend it to our will.
Optional step: If you are not very familiar with GitHub repositories I have added a log entry where I explain just enough to get me in trouble with any real programmers but maybe enough to help you understand which folders and files we will want to study. See Log entry Files in Github
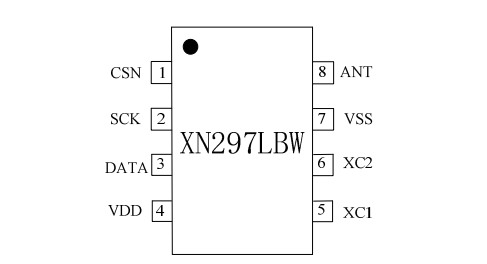
Second task: Learn about how the controller communicates with the quad. (Hint: the whole radio is in a single chip) See log entry Communication between the remote and the Quad
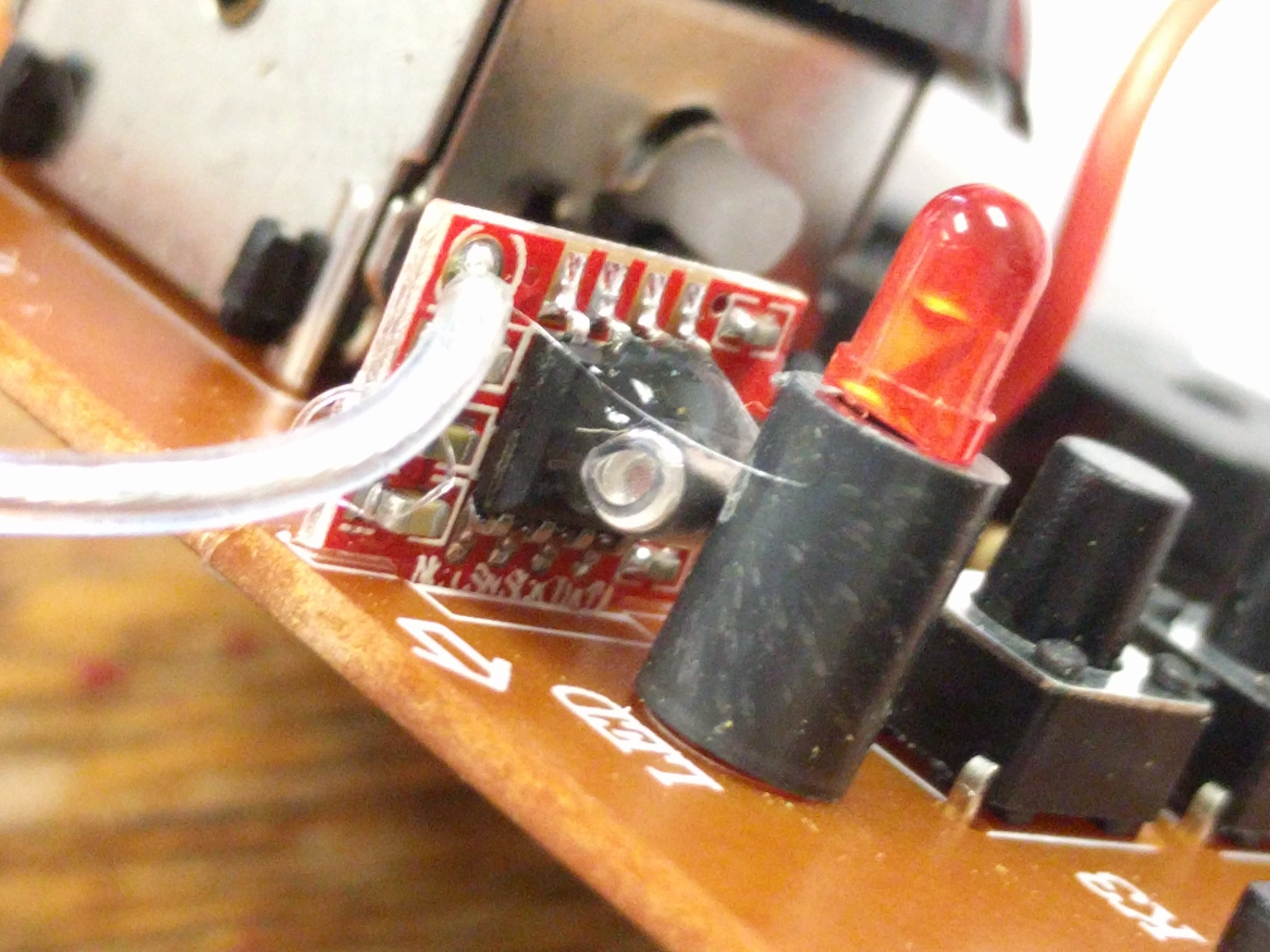
Now that we understand how the controller and the quad talk to each other we want to eavesdrop on their conversation. See log entry Snooping on SPI
Paul is digging deep into the code that Silverxxx provided to see if we can inject our own data into the stream.


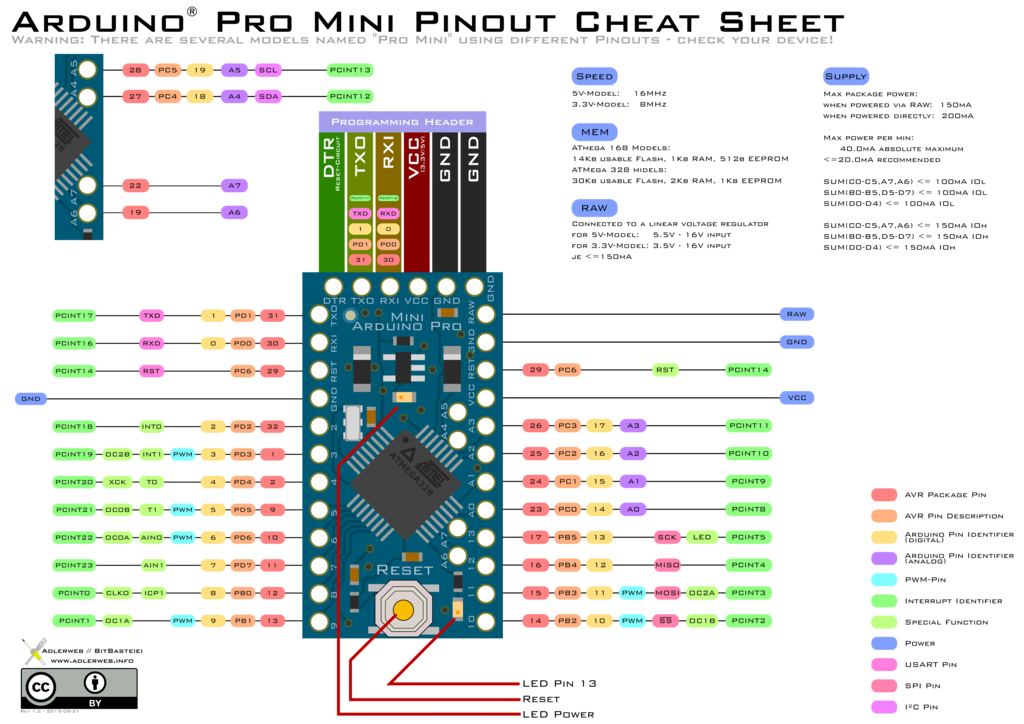 (Ignore the red lines)
(Ignore the red lines)



 Paul Andrews
Paul Andrews
 PixJuan
PixJuan
 Lixie Labs
Lixie Labs