I'm trying to build a humanoid robot based on BLDC motors instead of steppers or servos and I'm designing my custom controller board. I'm facing this beginner problem: powerful motor de-stabilizes power supply for the controller. I will write up the project in details later, when I achieve some degree of success which can be shared, but right now I'm asking for help. Details about my design and the trouble I'm experiencing can be found here http://www.dizzy.ai/2017/12/08/interference. Any input on how to mitigate the problem will be highly appreciated!
Link provided explains problem in details. Here I will just give brief overview.
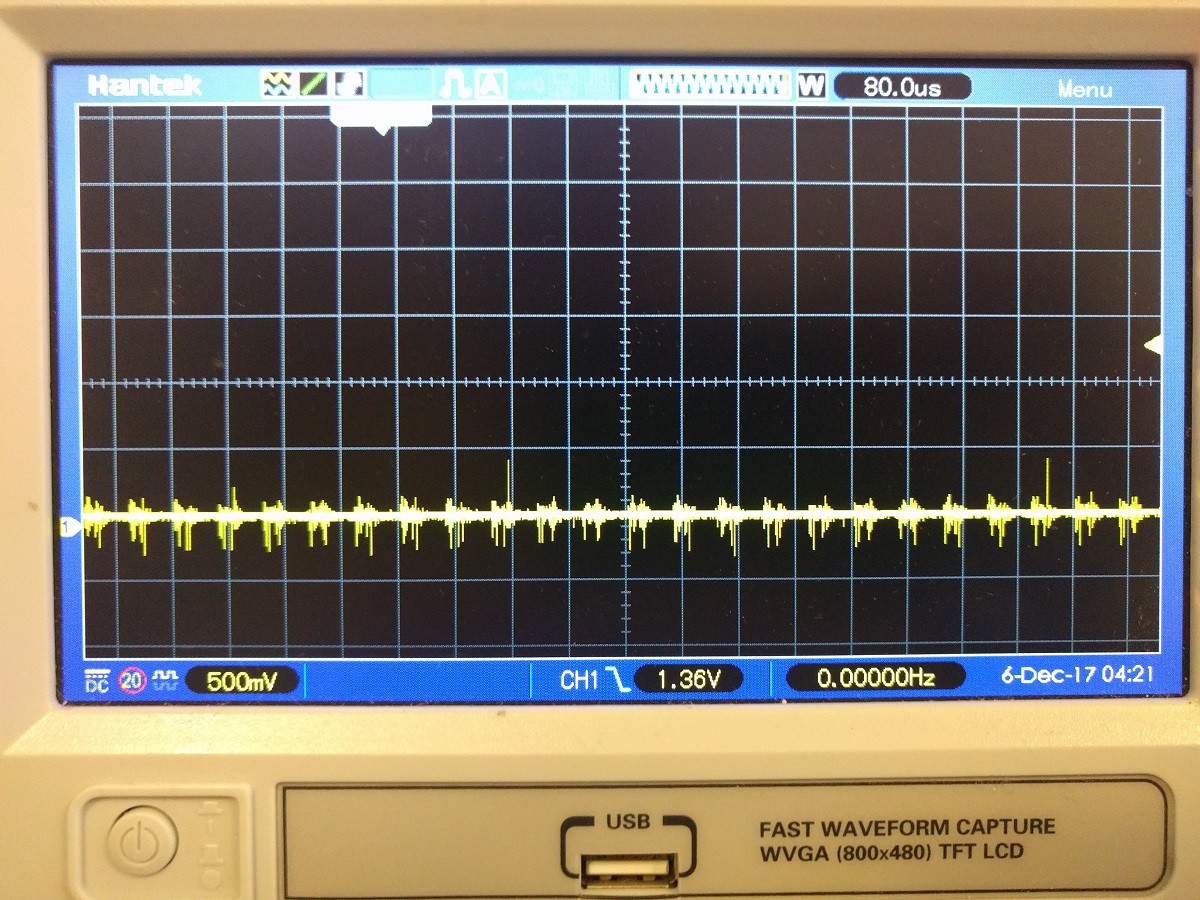
This is what I see between two ground points:
This is what I see instead of 3.3V

Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
You need decoupling capacitors. Add a large value (100-1000uf) electrolytic on your power rail close to the mosfets, and then another pair of them, a 10uf and a 0.1uf, right next to the IC. That should get you most of the way there.
Are you sure? yes | no
Daren, you are exactly right! I solved it (long ago) by adding decoupling capacitor close to mosfets. This taught me how much inductance there is in 20cm wire!
Are you sure? yes | no
Ooops. Looks like I'm about a year late to the party. That is so me, you have no idea. :)
Glad it worked out for you and you figured it out.
Are you sure? yes | no