-
Dizzy Wolf
03/21/2019 at 02:10 • 0 commentsI'm going to take a next step and build actual 4-legged robot based on (modified) these controllers. Look here for future updates: https://hackaday.io/project/164493-dizzy-wolf
-
First working release
11/16/2018 at 08:52 • 0 commentsLots and lots happened since my last post - I think I have done 5 or 10 versions before finally arriving at something that I'm (relatively) happy with.
Video first, then a couple of words.
The controller emerged as an attempt to build direct-drive robotic actuators. I did not like the complexity of the gearbox and wanted elegantly simple and smooth design. Well, it worked out very well. Unfortunately not strong enough to drive biped humanoid robot, but can be perfectly fine for other designs.
The controller measures position of the rotor via magnetic sensor and applies sinusoidal PWM at exactly +-90 deg at all times. This means that it applies constant torque in stall and close to stall situations, exactly is requires by robotics.
Size of the board was chosen to directly fit the back of BLDC camera gimbal motor which conveniently comes with magnet pre-installed. Other types or motors can be driven as long as magnet is mounted on the rotor and located close to sensor.
More information here: https://www.dizzy.ai/documentation/motor-driver/
-
Interference on ground and 3.3V
12/09/2017 at 03:35 • 3 commentsI'm trying to build a humanoid robot based on BLDC motors instead of steppers or servos and I'm designing my custom controller board. I'm facing this beginner problem: powerful motor de-stabilizes power supply for the controller. I will write up the project in details later, when I achieve some degree of success which can be shared, but right now I'm asking for help. Details about my design and the trouble I'm experiencing can be found here http://www.dizzy.ai/2017/12/08/interference. Any input on how to mitigate the problem will be highly appreciated!
Link provided explains problem in details. Here I will just give brief overview.
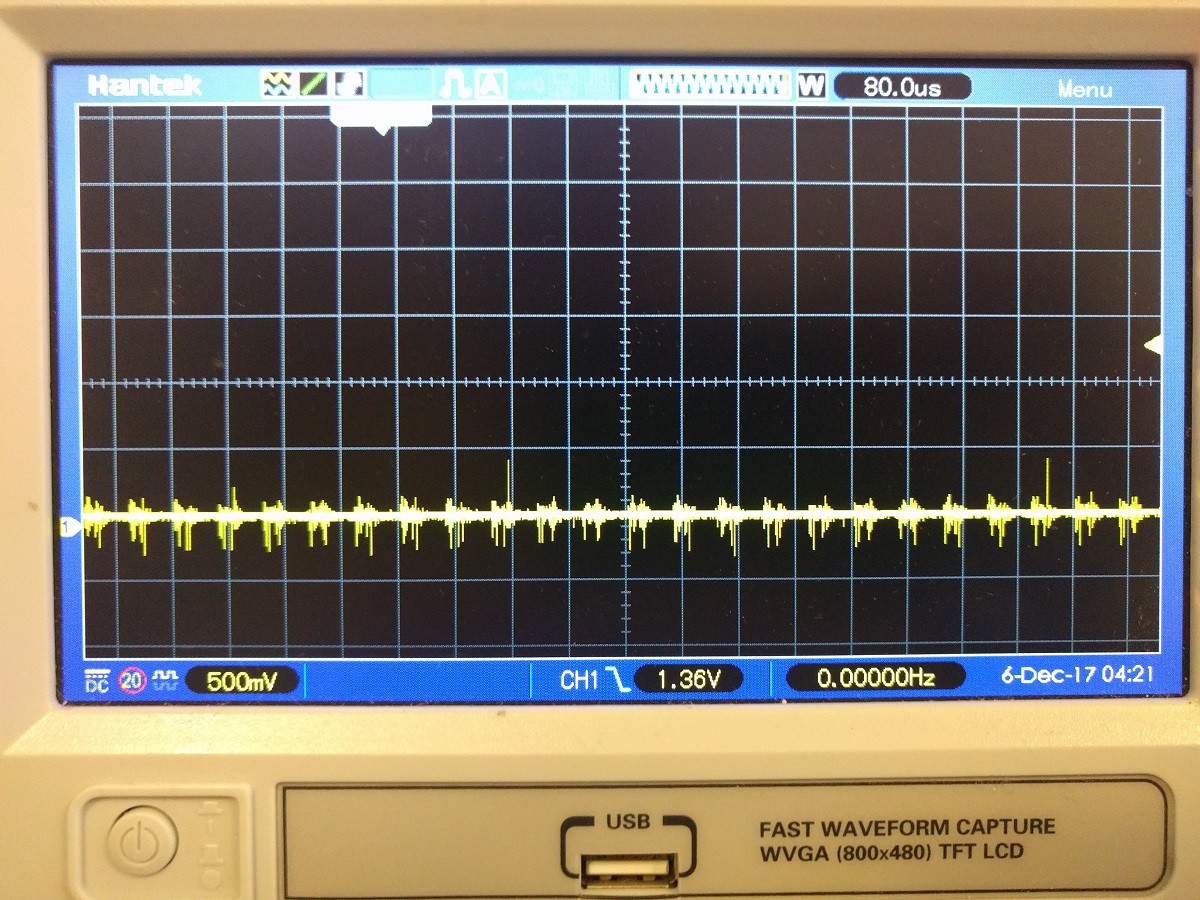
This is what I see between two ground points:
![]()
This is what I see instead of 3.3V
![]()